Example-01: Optimizaion (import/export API)
[1]:
# Loading API facilitates (suboptimal) interface with different optimization libraries
# In this example, quadrupole gradients are used to fit beta functions
[2]:
from pathlib import Path
from model.external import load_sdds
from model.external import load_lattice
from model.external import text_lattice
import numpy
from numpy import ndarray as Array
from scipy.optimize import minimize
[3]:
# Set quadrupole gradient and compute and return twiss parameters
def evaluate(knobs:Array) -> Array:
kf, kd = knobs
path:Path = Path('optimize.lte')
lattice:dict[str, dict[str, str | int | float | dict]] = load_lattice(path)
lattice['QF']['K1'] = float(kf)
lattice['QD']['K1'] = float(kd)
with path.open('w') as stream:
stream.write(text_lattice('LTE', lattice))
!elegant 'optimize.ele' > /dev/null
!sddsconvert -ascii 'binary.twiss' 'optimize.twiss'
path:Path = Path('optimize.twiss')
_, columns = load_sdds(path)
return numpy.asarray([[data['betax'], data['betay']] for location, data in columns.items()]).T
[4]:
# Set target beta functions
target:Array = numpy.asarray([+0.21, -0.19])
result:Array = evaluate(target)
[5]:
# Set objetive function to minimize
def objective(knobs:Array) -> Array:
return numpy.sum((evaluate(knobs) - result)**2)
objective(target)
[5]:
0.0
[6]:
# Optimize
knobs:Array = numpy.asarray([+0.20, -0.20])
minimize(objective, knobs, method='Nelder-Mead')
[6]:
message: Optimization terminated successfully.
success: True
status: 0
fun: 1.3489521479279302e-28
x: [ 2.100e-01 -1.900e-01]
nit: 20
nfev: 40
final_simplex: (array([[ 2.100e-01, -1.900e-01],
[ 2.100e-01, -1.900e-01],
[ 2.100e-01, -1.900e-01]]), array([ 1.349e-28, 2.891e-05, 6.010e-05]))
Example-02: Workflow (MADX)
[1]:
from pathlib import Path
from model.external import load_lattice
from model.external import rift_lattice
from model.external import text_lattice
from model.external import load_tfs
from model.external import convert
from model.external import add_rc
[2]:
# Given some initial MADX lattice file (FODO)
file = Path('initial.madx')
with file.open('r') as stream:
print(stream.read())
# Several regular elements are defined
# HEAD and TAIL should appear as the first and the last elements
# All elements should be defined on a single line with numerical parameters
# Lattice should be defined using lines
# Comma after element type is mandatory
# Comments appearing after definitions should also represent an element definition
DR: DRIFT, L=2.0;
BM: SBEND, L=1.0, ANGLE=0.17453292519943295;
QF: QUADRUPOLE, L=1.0, K1=+0.2;
QD: QUADRUPOLE, L=0.5, K1=-0.2;
M: MONITOR,;
HEAD: MARKER,; ! TEST: DRIFT,
TAIL: MARKER,; ! TEST: DRIFT,
FODO: LINE=(HEAD, M, QD, DR, BM, DR, QF, DR, BM, DR, QD, TAIL) ;
[3]:
# If element and beamline definitions comply with the above requirements
# The lattice file can be loaded as a python dictionary
lattice = load_lattice(file)
for key, value in lattice.items():
print(key, value)
# For each element and beamline, a key-value pair in created
# Value is itself a dictionary containing all information about the original elements
# Each element parameter is casted from string to int, float or string
# Comment after element definition is saved into RC (it has a special use case, see below)
DR {'KIND': 'DRIFT', 'RC': '', 'L': 2.0}
BM {'KIND': 'SBEND', 'RC': '', 'L': 1.0, 'ANGLE': 0.17453292519943295}
QF {'KIND': 'QUADRUPOLE', 'RC': '', 'L': 1.0, 'K1': 0.2}
QD {'KIND': 'QUADRUPOLE', 'RC': '', 'L': 0.5, 'K1': -0.2}
M {'KIND': 'MONITOR', 'RC': ''}
HEAD {'KIND': 'MARKER', 'RC': 'TEST: DRIFT,'}
TAIL {'KIND': 'MARKER', 'RC': 'TEST: DRIFT,'}
FODO {'KIND': 'LINE', 'SEQUENCE': ['HEAD', 'M', 'QD', 'DR', 'BM', 'DR', 'QF', 'DR', 'BM', 'DR', 'QD', 'TAIL']}
[4]:
# Error lattice is defined by a set of linear transformations between selected locations
# Each locations can be a MONITOR (beam observation) or a VIRTUAL (error)
# Two special locatons (HEAD and TAIL) should present in the lattice
# Using the above dictionary representation, new observation locations can be inserted
# Locations are inserted at the middle of selected elements (selected by type or name)
# Selected elements are splitted in half and renamed, old names are binded to beamlines
# Original element definitions are added to created location RC
# Typicaly, monitor locations correspond to MONITOR elements, but new monitor elements can be also inserted
# Virtual locations can be inserted into quadrupole or other elements to represent errors
lattice = rift_lattice(lattice,
'MONITOR',
'MARKER',
['DRIFT'],
['SBEND', 'QUADRUPOLE'],
exclude_virtual=['QD'])
for key, value in lattice.items():
print(key, value)
M_DR {'KIND': 'MONITOR', 'RC': ['DR', {'KIND': 'DRIFT', 'L': 2.0}]}
H_DR {'KIND': 'DRIFT', 'L': 1.0}
DR {'KIND': 'LINE', 'SEQUENCE': ['H_DR', 'M_DR', 'H_DR']}
V_BM {'KIND': 'MARKER', 'RC': ['BM', {'KIND': 'SBEND', 'L': 1.0, 'ANGLE': 0.17453292519943295}]}
H_BM {'KIND': 'SBEND', 'L': 0.5, 'ANGLE': 0.08726646259971647}
BM {'KIND': 'LINE', 'SEQUENCE': ['H_BM', 'V_BM', 'H_BM']}
V_QF {'KIND': 'MARKER', 'RC': ['QF', {'KIND': 'QUADRUPOLE', 'L': 1.0, 'K1': 0.2}]}
H_QF {'KIND': 'QUADRUPOLE', 'L': 0.5, 'K1': 0.2}
QF {'KIND': 'LINE', 'SEQUENCE': ['H_QF', 'V_QF', 'H_QF']}
QD {'KIND': 'QUADRUPOLE', 'RC': '', 'L': 0.5, 'K1': -0.2}
M {'KIND': 'MONITOR', 'RC': ''}
HEAD {'KIND': 'MARKER', 'RC': 'TEST: DRIFT,'}
TAIL {'KIND': 'MARKER', 'RC': 'TEST: DRIFT,'}
FODO {'KIND': 'LINE', 'SEQUENCE': ['HEAD', 'M', 'QD', 'DR', 'BM', 'DR', 'QF', 'DR', 'BM', 'DR', 'QD', 'TAIL']}
[5]:
# Modified lattice can be converted to text
# Comments are added to locations while original comments are preserved
text = text_lattice('MADX', lattice, rc=True)
print(text)
M_DR: MONITOR,; ! DR: DRIFT, L=2.0,;
H_DR: DRIFT, L=1.0,;
DR: LINE=(H_DR, M_DR, H_DR);
V_BM: MARKER,; ! BM: SBEND, L=1.0, ANGLE=0.17453292519943295,;
H_BM: SBEND, L=0.5, ANGLE=0.08726646259971647,;
BM: LINE=(H_BM, V_BM, H_BM);
V_QF: MARKER,; ! QF: QUADRUPOLE, L=1.0, K1=0.2,;
H_QF: QUADRUPOLE, L=0.5, K1=0.2,;
QF: LINE=(H_QF, V_QF, H_QF);
QD: QUADRUPOLE, L=0.5, K1=-0.2,;
M: MONITOR,;
HEAD: MARKER,; ! TEST: DRIFT,
TAIL: MARKER,; ! TEST: DRIFT,
FODO: LINE=(HEAD, M, QD, DR, BM, DR, QF, DR, BM, DR, QD, TAIL);
[6]:
# Compute TWISS parameters using MADX
# TWISS command is appended to modified lattice
task = """
BEAM;
USE, PERIOD=FODO;
SET,FORMAT="20.20f","-20s";
TWISS;
WRITE,TABLE=TWISS,FILE="final.tfs";
RETURN;
""" ;
with Path('final.madx').open('w') as stream:
stream.write(text)
stream.write(task)
!madx final.madx > /dev/null
[7]:
# Load lattice can be also loaded from file
# Original comments will be parsed as elements (look at HEAD and TAIL)
# Empty RC will be nested in this case
file = Path('final.madx')
with file.open('w') as stream:
stream.write(text)
lattice = load_lattice(file, rc=True)
for key, value in lattice.items():
print(key, value)
M_DR {'KIND': 'MONITOR', 'RC': ['DR', {'KIND': 'DRIFT', 'RC': '', 'L': 2.0}]}
H_DR {'KIND': 'DRIFT', 'RC': ['', {'KIND': '', 'RC': ''}], 'L': 1.0}
DR {'KIND': 'LINE', 'SEQUENCE': ['H_DR', 'M_DR', 'H_DR']}
V_BM {'KIND': 'MARKER', 'RC': ['BM', {'KIND': 'SBEND', 'RC': '', 'L': 1.0, 'ANGLE': 0.17453292519943295}]}
H_BM {'KIND': 'SBEND', 'RC': ['', {'KIND': '', 'RC': ''}], 'L': 0.5, 'ANGLE': 0.08726646259971647}
BM {'KIND': 'LINE', 'SEQUENCE': ['H_BM', 'V_BM', 'H_BM']}
V_QF {'KIND': 'MARKER', 'RC': ['QF', {'KIND': 'QUADRUPOLE', 'RC': '', 'L': 1.0, 'K1': 0.2}]}
H_QF {'KIND': 'QUADRUPOLE', 'RC': ['', {'KIND': '', 'RC': ''}], 'L': 0.5, 'K1': 0.2}
QF {'KIND': 'LINE', 'SEQUENCE': ['H_QF', 'V_QF', 'H_QF']}
QD {'KIND': 'QUADRUPOLE', 'RC': ['', {'KIND': '', 'RC': ''}], 'L': 0.5, 'K1': -0.2}
M {'KIND': 'MONITOR', 'RC': ['', {'KIND': '', 'RC': ''}]}
HEAD {'KIND': 'MARKER', 'RC': ['TEST', {'KIND': 'DRIFT', 'RC': ''}]}
TAIL {'KIND': 'MARKER', 'RC': ['TEST', {'KIND': 'DRIFT', 'RC': ''}]}
FODO {'KIND': 'LINE', 'SEQUENCE': ['HEAD', 'M', 'QD', 'DR', 'BM', 'DR', 'QF', 'DR', 'BM', 'DR', 'QD', 'TAIL']}
[8]:
# TWISS results can be loaded into python dictionaries
data = Path('final.tfs')
parameters, columns = load_tfs(data)
[9]:
# Optics data can be converted into model table
# Note, all locations have different name
# If an element appear several times in a line, locations are renamed
table = convert(columns, 'TFS', ['MONITOR'], ['MARKER'], rc=True)
table
[9]:
{'HEAD': {'TYPE': 'VIRTUAL',
'S': 0.0,
'BX': 4.287017735718936,
'AX': -3.338e-16,
'FX': 0.0,
'BY': 19.818489282044894,
'AY': -2.975e-17,
'FY': 0.0,
'DQX': 1.5490410441348796,
'DPX': 5.551e-17,
'DQY': 0.0,
'DPY': -0.0,
'RC': None},
'M': {'TYPE': 'MONITOR',
'S': 0.0,
'BX': 4.287017735718936,
'AX': -3.338e-16,
'FX': 0.0,
'BY': 19.818489282044894,
'AY': -2.975e-17,
'FY': 0.0,
'DQX': 1.5490410441348796,
'DPX': 5.551e-17,
'DQY': 0.0,
'DPY': -0.0,
'RC': None},
'M_DR': {'TYPE': 'MONITOR',
'S': 1.5,
'BX': 5.980356480296974,
'AX': -0.8524040348462865,
'FX': 0.3068185833848285,
'BY': 15.315159900296642,
'AY': 1.6491678474974667,
'FY': 0.08453149247893033,
'DQX': 1.744126900814982,
'DPX': 0.1561982029636459,
'DQY': 0.0,
'DPY': 0.0,
'RC': None},
'V_BM': {'TYPE': 'VIRTUAL',
'S': 3.0,
'BX': 9.120629409698159,
'AX': -1.1465687400023221,
'FX': 0.5107301354647854,
'BY': 10.914137614299745,
'AY': 1.2848470098337954,
'FY': 0.20081415045191314,
'DQX': 1.992896582518225,
'DPX': 0.21385269164968151,
'DQY': 0.0,
'DPY': 0.0,
'RC': None},
'M_DR_1': {'TYPE': 'MONITOR',
'S': 4.5,
'BX': 12.70896979457465,
'AX': -1.3363966727488819,
'FX': 0.6500917125372264,
'BY': 7.606077841293864,
'AY': 0.9205261721701236,
'FY': 0.3661997931359615,
'DQX': 2.3837861006470566,
'DPX': 0.26987963222618605,
'DQY': 0.0,
'DPY': 0.0,
'RC': None},
'V_QF': {'TYPE': 'VIRTUAL',
'S': 6.0,
'BX': 16.392007194825762,
'AX': -8.0415e-16,
'FX': 0.7521811118347426,
'BY': 5.674619594695141,
'AY': -2.5871e-16,
'FY': 0.601131166393595,
'DQX': 2.7214181783177667,
'DPX': 5.551e-17,
'DQY': 0.0,
'DPY': 0.0,
'RC': None},
'M_DR_2': {'TYPE': 'MONITOR',
'S': 7.5,
'BX': 12.708969794574653,
'AX': 1.336396672748881,
'FX': 0.8542705111322586,
'BY': 7.606077841293868,
'AY': -0.9205261721701244,
'FY': 0.8360625396512283,
'DQX': 2.3837861006470566,
'DPX': -0.26987963222618594,
'DQY': 0.0,
'DPY': 0.0,
'RC': None},
'V_BM_1': {'TYPE': 'VIRTUAL',
'S': 9.0,
'BX': 9.120629409698164,
'AX': 1.146568740002322,
'FX': 0.9936320882046995,
'BY': 10.914137614299747,
'AY': -1.2848470098337954,
'FY': 1.0014481823352765,
'DQX': 1.9928965825182252,
'DPX': -0.21385269164968146,
'DQY': 0.0,
'DPY': 0.0,
'RC': None},
'M_DR_3': {'TYPE': 'MONITOR',
'S': 10.5,
'BX': 5.980356480296976,
'AX': 0.8524040348462865,
'FX': 1.1975436402846564,
'BY': 15.315159900296639,
'AY': -1.6491678474974665,
'FY': 1.1177308403082595,
'DQX': 1.7441269008149822,
'DPX': -0.1561982029636459,
'DQY': 0.0,
'DPY': 0.0,
'RC': None},
'TAIL': {'TYPE': 'VIRTUAL',
'S': 12.0,
'BX': 4.287017735718939,
'AX': 3.6486e-16,
'FX': 1.5043622236694847,
'BY': 19.81848928204488,
'AY': -5.5051e-16,
'FY': 1.2022623327871897,
'DQX': 1.54904104413488,
'DPX': -2.776e-17,
'DQY': 0.0,
'DPY': 0.0,
'RC': None}}
[10]:
# RC parameter from lattice data can be added to model table
# Configuration table can be saved using util.save
table = add_rc(table, lattice)
table
[10]:
{'HEAD': {'TYPE': 'VIRTUAL',
'S': 0.0,
'BX': 4.287017735718936,
'AX': -3.338e-16,
'FX': 0.0,
'BY': 19.818489282044894,
'AY': -2.975e-17,
'FY': 0.0,
'DQX': 1.5490410441348796,
'DPX': 5.551e-17,
'DQY': 0.0,
'DPY': -0.0,
'RC': None},
'M': {'TYPE': 'MONITOR',
'S': 0.0,
'BX': 4.287017735718936,
'AX': -3.338e-16,
'FX': 0.0,
'BY': 19.818489282044894,
'AY': -2.975e-17,
'FY': 0.0,
'DQX': 1.5490410441348796,
'DPX': 5.551e-17,
'DQY': 0.0,
'DPY': -0.0,
'RC': None},
'M_DR': {'TYPE': 'MONITOR',
'S': 1.5,
'BX': 5.980356480296974,
'AX': -0.8524040348462865,
'FX': 0.3068185833848285,
'BY': 15.315159900296642,
'AY': 1.6491678474974667,
'FY': 0.08453149247893033,
'DQX': 1.744126900814982,
'DPX': 0.1561982029636459,
'DQY': 0.0,
'DPY': 0.0,
'RC': ['DR', {'KIND': 'DRIFT', 'L': 2.0}]},
'V_BM': {'TYPE': 'VIRTUAL',
'S': 3.0,
'BX': 9.120629409698159,
'AX': -1.1465687400023221,
'FX': 0.5107301354647854,
'BY': 10.914137614299745,
'AY': 1.2848470098337954,
'FY': 0.20081415045191314,
'DQX': 1.992896582518225,
'DPX': 0.21385269164968151,
'DQY': 0.0,
'DPY': 0.0,
'RC': ['BM', {'KIND': 'SBEND', 'L': 1.0, 'ANGLE': 0.17453292519943295}]},
'M_DR_1': {'TYPE': 'MONITOR',
'S': 4.5,
'BX': 12.70896979457465,
'AX': -1.3363966727488819,
'FX': 0.6500917125372264,
'BY': 7.606077841293864,
'AY': 0.9205261721701236,
'FY': 0.3661997931359615,
'DQX': 2.3837861006470566,
'DPX': 0.26987963222618605,
'DQY': 0.0,
'DPY': 0.0,
'RC': ['DR', {'KIND': 'DRIFT', 'L': 2.0}]},
'V_QF': {'TYPE': 'VIRTUAL',
'S': 6.0,
'BX': 16.392007194825762,
'AX': -8.0415e-16,
'FX': 0.7521811118347426,
'BY': 5.674619594695141,
'AY': -2.5871e-16,
'FY': 0.601131166393595,
'DQX': 2.7214181783177667,
'DPX': 5.551e-17,
'DQY': 0.0,
'DPY': 0.0,
'RC': ['QF', {'KIND': 'QUADRUPOLE', 'L': 1.0, 'K1': 0.2}]},
'M_DR_2': {'TYPE': 'MONITOR',
'S': 7.5,
'BX': 12.708969794574653,
'AX': 1.336396672748881,
'FX': 0.8542705111322586,
'BY': 7.606077841293868,
'AY': -0.9205261721701244,
'FY': 0.8360625396512283,
'DQX': 2.3837861006470566,
'DPX': -0.26987963222618594,
'DQY': 0.0,
'DPY': 0.0,
'RC': ['DR', {'KIND': 'DRIFT', 'L': 2.0}]},
'V_BM_1': {'TYPE': 'VIRTUAL',
'S': 9.0,
'BX': 9.120629409698164,
'AX': 1.146568740002322,
'FX': 0.9936320882046995,
'BY': 10.914137614299747,
'AY': -1.2848470098337954,
'FY': 1.0014481823352765,
'DQX': 1.9928965825182252,
'DPX': -0.21385269164968146,
'DQY': 0.0,
'DPY': 0.0,
'RC': ['BM', {'KIND': 'SBEND', 'L': 1.0, 'ANGLE': 0.17453292519943295}]},
'M_DR_3': {'TYPE': 'MONITOR',
'S': 10.5,
'BX': 5.980356480296976,
'AX': 0.8524040348462865,
'FX': 1.1975436402846564,
'BY': 15.315159900296639,
'AY': -1.6491678474974665,
'FY': 1.1177308403082595,
'DQX': 1.7441269008149822,
'DPX': -0.1561982029636459,
'DQY': 0.0,
'DPY': 0.0,
'RC': ['DR', {'KIND': 'DRIFT', 'L': 2.0}]},
'TAIL': {'TYPE': 'VIRTUAL',
'S': 12.0,
'BX': 4.287017735718939,
'AX': 3.6486e-16,
'FX': 1.5043622236694847,
'BY': 19.81848928204488,
'AY': -5.5051e-16,
'FY': 1.2022623327871897,
'DQX': 1.54904104413488,
'DPX': -2.776e-17,
'DQY': 0.0,
'DPY': 0.0,
'RC': None}}
Example-03: Workflow (ELEGANT)
[1]:
from pathlib import Path
from model.external import load_lattice
from model.external import rift_lattice
from model.external import text_lattice
from model.external import load_sdds
from model.external import convert
from model.external import add_rc
[2]:
# Given some initial ELEGANT lattice file (FODO)
file = Path('initial.lte')
with file.open('r') as stream:
print(stream.read())
# Several regular elements are defined
# HEAD and TAIL should appear as the first and the last elements
# All elements should be defined on a single line with numerical parameters
# Lattice should be defined using lines
# Comma after element type is mandatory
# Comments appearing after definitions should also represent an element definition
DR: DRIF,l=2
BM: CSBEND,angle=0.17453292519943295,fint=0,l=1.0
QD: QUAD,k1=-0.2,l=0.5
QF: QUAD,k1=0.2,l=1.0
M: MONI,
HEAD: MARK, ! TEST: DRIF,
TAIL: MARK, ! TEST: DRIF,
FODO: LINE=(HEAD, M, QD, DR, BM, DR, QF, DR, BM, DR, QD, TAIL)
[3]:
# If element and beamline definitions comply with the above requirements
# The lattice file can be loaded as a python dictionary
lattice = load_lattice(file)
for key, value in lattice.items():
print(key, value)
# For each element and beamline, a key-value pair in created
# Value is itself a dictionary containing all information about the original elements
# Each element parameter is casted from string to int, float or string
# Comment after element definition is saved into RC (it has a special use case, see below)
DR {'KIND': 'DRIF', 'RC': '', 'L': 2}
BM {'KIND': 'CSBEND', 'RC': '', 'ANGLE': 0.17453292519943295, 'FINT': 0, 'L': 1.0}
QD {'KIND': 'QUAD', 'RC': '', 'K1': -0.2, 'L': 0.5}
QF {'KIND': 'QUAD', 'RC': '', 'K1': 0.2, 'L': 1.0}
M {'KIND': 'MONI', 'RC': ''}
HEAD {'KIND': 'MARK', 'RC': 'TEST: DRIF,'}
TAIL {'KIND': 'MARK', 'RC': 'TEST: DRIF,'}
FODO {'KIND': 'LINE', 'SEQUENCE': ['HEAD', 'M', 'QD', 'DR', 'BM', 'DR', 'QF', 'DR', 'BM', 'DR', 'QD', 'TAIL']}
[4]:
# Error lattice is defined by a set of linear transformations between selected locations
# Each locations can be a MONITOR (beam observation) or a VIRTUAL (error)
# Two special locatons (HEAD and TAIL) should present in the lattice
# Using the above dictionary representation, new observation locations can be inserted
# Locations are inserted at the middle of selected elements (selected by type or name)
# Selected elements are splitted in half and renamed, old names are binded to beamlines
# Original element definitions are added to created location RC
# Typicaly, monitor locations correspond to MONITOR elements, but new monitor elements can be also inserted
# Virtual locations can be inserted into quadrupole or other elements to represent errors
lattice = rift_lattice(lattice,
'MONI',
'MARK',
['DRIF'],
['CSBEND', 'QUAD'],
exclude_virtual=['QD'])
for key, value in lattice.items():
print(key, value)
M_DR {'KIND': 'MONI', 'RC': ['DR', {'KIND': 'DRIF', 'L': 2}]}
H_DR {'KIND': 'DRIF', 'L': 1.0}
DR {'KIND': 'LINE', 'SEQUENCE': ['H_DR', 'M_DR', 'H_DR']}
V_BM {'KIND': 'MARK', 'RC': ['BM', {'KIND': 'CSBEND', 'ANGLE': 0.17453292519943295, 'FINT': 0, 'L': 1.0}]}
H_BM {'KIND': 'CSBEND', 'ANGLE': 0.08726646259971647, 'FINT': 0, 'L': 0.5}
BM {'KIND': 'LINE', 'SEQUENCE': ['H_BM', 'V_BM', 'H_BM']}
QD {'KIND': 'QUAD', 'RC': '', 'K1': -0.2, 'L': 0.5}
V_QF {'KIND': 'MARK', 'RC': ['QF', {'KIND': 'QUAD', 'K1': 0.2, 'L': 1.0}]}
H_QF {'KIND': 'QUAD', 'K1': 0.2, 'L': 0.5}
QF {'KIND': 'LINE', 'SEQUENCE': ['H_QF', 'V_QF', 'H_QF']}
M {'KIND': 'MONI', 'RC': ''}
HEAD {'KIND': 'MARK', 'RC': 'TEST: DRIF,'}
TAIL {'KIND': 'MARK', 'RC': 'TEST: DRIF,'}
FODO {'KIND': 'LINE', 'SEQUENCE': ['HEAD', 'M', 'QD', 'DR', 'BM', 'DR', 'QF', 'DR', 'BM', 'DR', 'QD', 'TAIL']}
[5]:
# Modified lattice can be converted to text
# Comments are added to locations while original comments are preserved
text = text_lattice('LTE', lattice, rc=True)
print(text)
M_DR: MONI, ! DR: DRIF, L=2,
H_DR: DRIF, L=1.0,
DR: LINE=(H_DR, M_DR, H_DR)
V_BM: MARK, ! BM: CSBEND, ANGLE=0.17453292519943295, FINT=0, L=1.0,
H_BM: CSBEND, ANGLE=0.08726646259971647, FINT=0, L=0.5,
BM: LINE=(H_BM, V_BM, H_BM)
QD: QUAD, K1=-0.2, L=0.5,
V_QF: MARK, ! QF: QUAD, K1=0.2, L=1.0,
H_QF: QUAD, K1=0.2, L=0.5,
QF: LINE=(H_QF, V_QF, H_QF)
M: MONI,
HEAD: MARK, ! TEST: DRIF,
TAIL: MARK, ! TEST: DRIF,
FODO: LINE=(HEAD, M, QD, DR, BM, DR, QF, DR, BM, DR, QD, TAIL)
[6]:
# Compute TWISS parameters using ELEGANT
# Separate command file is created
with Path('final.lte').open('w') as stream:
stream.write(text)
task = """
&run_setup
use_beamline="FODO",
lattice = "final.lte",
p_central_mev = 1000
&end
&run_control
&end
&twiss_output
filename = "binary.twiss",
output_at_each_step = 1
&end
&bunched_beam
&end
&track
&end
""" ;
with Path('final.ele').open('w') as stream:
stream.write(task)
!elegant final.ele > /dev/null
!sddsconvert -ascii binary.twiss final.twiss
[7]:
# Load lattice can be also loaded from file
# Original comments will be parsed as elements (look at HEAD and TAIL)
# Empty RC will be nested in this case
file = Path('final.lte')
with file.open('w') as stream:
stream.write(text)
lattice = load_lattice(file, rc=True)
for key, value in lattice.items():
print(key, value)
M_DR {'KIND': 'MONI', 'RC': ['DR', {'KIND': 'DRIF', 'RC': '', 'L': 2}]}
H_DR {'KIND': 'DRIF', 'RC': ['', {'KIND': '', 'RC': ''}], 'L': 1.0}
DR {'KIND': 'LINE', 'SEQUENCE': ['H_DR', 'M_DR', 'H_DR']}
V_BM {'KIND': 'MARK', 'RC': ['BM', {'KIND': 'CSBEND', 'RC': '', 'ANGLE': 0.17453292519943295, 'FINT': 0, 'L': 1.0}]}
H_BM {'KIND': 'CSBEND', 'RC': ['', {'KIND': '', 'RC': ''}], 'ANGLE': 0.08726646259971647, 'FINT': 0, 'L': 0.5}
BM {'KIND': 'LINE', 'SEQUENCE': ['H_BM', 'V_BM', 'H_BM']}
QD {'KIND': 'QUAD', 'RC': ['', {'KIND': '', 'RC': ''}], 'K1': -0.2, 'L': 0.5}
V_QF {'KIND': 'MARK', 'RC': ['QF', {'KIND': 'QUAD', 'RC': '', 'K1': 0.2, 'L': 1.0}]}
H_QF {'KIND': 'QUAD', 'RC': ['', {'KIND': '', 'RC': ''}], 'K1': 0.2, 'L': 0.5}
QF {'KIND': 'LINE', 'SEQUENCE': ['H_QF', 'V_QF', 'H_QF']}
M {'KIND': 'MONI', 'RC': ['', {'KIND': '', 'RC': ''}]}
HEAD {'KIND': 'MARK', 'RC': ['TEST', {'KIND': 'DRIF', 'RC': ''}]}
TAIL {'KIND': 'MARK', 'RC': ['TEST', {'KIND': 'DRIF', 'RC': ''}]}
FODO {'KIND': 'LINE', 'SEQUENCE': ['HEAD', 'M', 'QD', 'DR', 'BM', 'DR', 'QF', 'DR', 'BM', 'DR', 'QD', 'TAIL']}
[8]:
# TWISS results can be loaded into python dictionaries
data = Path('final.twiss')
parameters, columns = load_sdds(data)
[9]:
# Optics data can be converted into model table
# Note, all locations have different name
# If an element appear several times in a line, locations are renamed
table = convert(columns, 'SDDS', ['MONI'], ['MARK'], rc=True)
table
[9]:
{'HEAD': {'S': 0.0,
'BX': 4.287017734831204,
'AX': -1.321304551729011e-16,
'FX': 0.0,
'DQX': 1.549040841795901,
'DPX': 2.775557561562891e-17,
'BY': 19.81848926815186,
'AY': 6.545730027929358e-16,
'FY': 0.0,
'DQY': 0.0,
'DPY': 0.0,
'TYPE': 'VIRTUAL',
'RC': None},
'M': {'S': 0.0,
'BX': 4.287017734831204,
'AX': -1.321304551729011e-16,
'FX': 0.0,
'DQX': 1.549040841795901,
'DPX': 2.775557561562891e-17,
'BY': 19.81848926815186,
'AY': 6.545730027929358e-16,
'FY': 0.0,
'DQY': 0.0,
'DPY': 0.0,
'TYPE': 'MONITOR',
'RC': None},
'M_DR': {'S': 1.5,
'BX': 5.980356479284525,
'AX': -0.8524040348212205,
'FX': 0.3068185834444499,
'DQX': 1.744126672993481,
'DPX': 0.1561981825607101,
'BY': 15.31515988971357,
'AY': 1.649167846239909,
'FY': 0.08453149253790615,
'DQY': 0.0,
'DPY': 0.0,
'TYPE': 'MONITOR',
'RC': None},
'V_BM': {'S': 3.0,
'BX': 9.120629409314306,
'AX': -1.146568740048648,
'FX': 0.5107301355818847,
'DQX': 1.99289632225274,
'DPX': 0.2138526637243729,
'BY': 10.91413760701325,
'AY': 1.284847009200138,
'FY': 0.2008141505892614,
'DQY': 0.0,
'DPY': 0.0,
'TYPE': 'VIRTUAL',
'RC': None},
'M_DR_1': {'S': 4.5,
'BX': 12.70896979491113,
'AX': -1.336396672789745,
'FX': 0.6500917126795847,
'DQX': 2.383785789407781,
'DPX': 0.2698795969893243,
'BY': 7.606077834992553,
'AY': 0.9205261718281931,
'FY': 0.3661997933967667,
'DQY': 0.0,
'DPY': 0.0,
'TYPE': 'MONITOR',
'RC': None},
'V_QF': {'S': 6.0,
'BX': 16.39200719526896,
'AX': 3.608224830031759e-16,
'FX': 0.7521811119743597,
'DQX': 2.721417822995524,
'DPX': -5.551115123125783e-17,
'BY': 5.674619589422572,
'AY': 8.326672684688672e-16,
'FY': 0.6011311668647427,
'DQY': 0.0,
'DPY': 0.0,
'TYPE': 'VIRTUAL',
'RC': None},
'M_DR_2': {'S': 7.5,
'BX': 12.70896979491113,
'AX': 1.336396672789746,
'FX': 0.8542705112691347,
'DQX': 2.383785789407781,
'DPX': -0.2698795969893243,
'BY': 7.606077834992548,
'AY': -0.920526171828191,
'FY': 0.8360625403327188,
'DQY': 0.0,
'DPY': 0.0,
'TYPE': 'MONITOR',
'RC': None},
'V_BM_1': {'S': 9.0,
'BX': 9.120629409314306,
'AX': 1.146568740048649,
'FX': 0.9936320883668346,
'DQX': 1.992896322252739,
'DPX': -0.2138526637243729,
'BY': 10.91413760701323,
'AY': -1.284847009200136,
'FY': 1.001448183140224,
'DQY': 0.0,
'DPY': 0.0,
'TYPE': 'VIRTUAL',
'RC': None},
'M_DR_3': {'S': 10.5,
'BX': 5.980356479284523,
'AX': 0.852404034821221,
'FX': 1.197543640504269,
'DQX': 1.744126672993481,
'DPX': -0.1561981825607101,
'BY': 15.31515988971355,
'AY': -1.649167846239906,
'FY': 1.11773084119158,
'DQY': 0.0,
'DPY': 0.0,
'TYPE': 'MONITOR',
'RC': None},
'TAIL': {'S': 12.0,
'BX': 4.287017734831201,
'AX': 5.273559366969493e-16,
'FX': 1.50436222394872,
'DQX': 1.549040841795901,
'DPX': -1.110223024625157e-16,
'BY': 19.81848926815184,
'AY': 1.387778780781446e-16,
'FY': 1.202262333729486,
'DQY': 0.0,
'DPY': 0.0,
'TYPE': 'VIRTUAL',
'RC': None}}
[10]:
# RC parameter from lattice data can be added to model table
# Configuration table can be saved using util.save
table = add_rc(table, lattice)
table
[10]:
{'HEAD': {'S': 0.0,
'BX': 4.287017734831204,
'AX': -1.321304551729011e-16,
'FX': 0.0,
'DQX': 1.549040841795901,
'DPX': 2.775557561562891e-17,
'BY': 19.81848926815186,
'AY': 6.545730027929358e-16,
'FY': 0.0,
'DQY': 0.0,
'DPY': 0.0,
'TYPE': 'VIRTUAL',
'RC': None},
'M': {'S': 0.0,
'BX': 4.287017734831204,
'AX': -1.321304551729011e-16,
'FX': 0.0,
'DQX': 1.549040841795901,
'DPX': 2.775557561562891e-17,
'BY': 19.81848926815186,
'AY': 6.545730027929358e-16,
'FY': 0.0,
'DQY': 0.0,
'DPY': 0.0,
'TYPE': 'MONITOR',
'RC': None},
'M_DR': {'S': 1.5,
'BX': 5.980356479284525,
'AX': -0.8524040348212205,
'FX': 0.3068185834444499,
'DQX': 1.744126672993481,
'DPX': 0.1561981825607101,
'BY': 15.31515988971357,
'AY': 1.649167846239909,
'FY': 0.08453149253790615,
'DQY': 0.0,
'DPY': 0.0,
'TYPE': 'MONITOR',
'RC': ['DR', {'KIND': 'DRIF', 'L': 2}]},
'V_BM': {'S': 3.0,
'BX': 9.120629409314306,
'AX': -1.146568740048648,
'FX': 0.5107301355818847,
'DQX': 1.99289632225274,
'DPX': 0.2138526637243729,
'BY': 10.91413760701325,
'AY': 1.284847009200138,
'FY': 0.2008141505892614,
'DQY': 0.0,
'DPY': 0.0,
'TYPE': 'VIRTUAL',
'RC': ['BM',
{'KIND': 'CSBEND', 'ANGLE': 0.17453292519943295, 'FINT': 0, 'L': 1.0}]},
'M_DR_1': {'S': 4.5,
'BX': 12.70896979491113,
'AX': -1.336396672789745,
'FX': 0.6500917126795847,
'DQX': 2.383785789407781,
'DPX': 0.2698795969893243,
'BY': 7.606077834992553,
'AY': 0.9205261718281931,
'FY': 0.3661997933967667,
'DQY': 0.0,
'DPY': 0.0,
'TYPE': 'MONITOR',
'RC': ['DR', {'KIND': 'DRIF', 'L': 2}]},
'V_QF': {'S': 6.0,
'BX': 16.39200719526896,
'AX': 3.608224830031759e-16,
'FX': 0.7521811119743597,
'DQX': 2.721417822995524,
'DPX': -5.551115123125783e-17,
'BY': 5.674619589422572,
'AY': 8.326672684688672e-16,
'FY': 0.6011311668647427,
'DQY': 0.0,
'DPY': 0.0,
'TYPE': 'VIRTUAL',
'RC': ['QF', {'KIND': 'QUAD', 'K1': 0.2, 'L': 1.0}]},
'M_DR_2': {'S': 7.5,
'BX': 12.70896979491113,
'AX': 1.336396672789746,
'FX': 0.8542705112691347,
'DQX': 2.383785789407781,
'DPX': -0.2698795969893243,
'BY': 7.606077834992548,
'AY': -0.920526171828191,
'FY': 0.8360625403327188,
'DQY': 0.0,
'DPY': 0.0,
'TYPE': 'MONITOR',
'RC': ['DR', {'KIND': 'DRIF', 'L': 2}]},
'V_BM_1': {'S': 9.0,
'BX': 9.120629409314306,
'AX': 1.146568740048649,
'FX': 0.9936320883668346,
'DQX': 1.992896322252739,
'DPX': -0.2138526637243729,
'BY': 10.91413760701323,
'AY': -1.284847009200136,
'FY': 1.001448183140224,
'DQY': 0.0,
'DPY': 0.0,
'TYPE': 'VIRTUAL',
'RC': ['BM',
{'KIND': 'CSBEND', 'ANGLE': 0.17453292519943295, 'FINT': 0, 'L': 1.0}]},
'M_DR_3': {'S': 10.5,
'BX': 5.980356479284523,
'AX': 0.852404034821221,
'FX': 1.197543640504269,
'DQX': 1.744126672993481,
'DPX': -0.1561981825607101,
'BY': 15.31515988971355,
'AY': -1.649167846239906,
'FY': 1.11773084119158,
'DQY': 0.0,
'DPY': 0.0,
'TYPE': 'MONITOR',
'RC': ['DR', {'KIND': 'DRIF', 'L': 2}]},
'TAIL': {'S': 12.0,
'BX': 4.287017734831201,
'AX': 5.273559366969493e-16,
'FX': 1.50436222394872,
'DQX': 1.549040841795901,
'DPX': -1.110223024625157e-16,
'BY': 19.81848926815184,
'AY': 1.387778780781446e-16,
'FY': 1.202262333729486,
'DQY': 0.0,
'DPY': 0.0,
'TYPE': 'VIRTUAL',
'RC': None}}
Example-04: Transformations benchmark (PTC)
[1]:
# In this example various symplectic transformations are compared with corresponding MADX-PTC transformations
[2]:
# calibration
import torch
from model.library.transformations import calibration_forward
from model.library.transformations import calibration_inverse
gxx = torch.tensor(1.005, dtype=torch.float64)
gxy = torch.tensor(0.001, dtype=torch.float64)
gyx = torch.tensor(0.005, dtype=torch.float64)
gyy = torch.tensor(0.955, dtype=torch.float64)
state = torch.tensor([0.01, -0.005, -0.01, 0.005], dtype=torch.float64)
res = calibration_forward(state, gxx, gxy, gyx, gyy)
res = calibration_inverse(res, gxx, gxy, gyx, gyy)
print(state.tolist())
print(res.tolist())
print((state - res).tolist())
[0.01, -0.005, -0.01, 0.005]
[0.010000000000000002, -0.005, -0.010000000000000002, 0.005]
[-1.734723475976807e-18, 0.0, 1.734723475976807e-18, 0.0]
[3]:
# drift
from pathlib import Path
from os import system
import torch
from model.library.transformations import drift
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
dp = torch.tensor(0.005, dtype=torch.float64)
length = torch.tensor(1.0, dtype=torch.float64)
state = torch.tensor([0.01, -0.005, -0.01, 0.005], dtype=torch.float64)
qx, px, qy, py = state.tolist()
code = f"""
mag:drift,l={length.item()} ;
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact=false ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=false ;
ptc_align;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp.item()},t=0.0 ;
ptc_track,icase=6,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}};
ptc_track_end;
ptc_end;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
res = drift(state, dp, length)
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.005024875621890547, -0.005, -0.005024875621890547, 0.005]
[0.005024875621890547, -0.005, -0.005024875621890547, 0.005]
[0.0, 0.0, 0.0, 0.0]
[4]:
# drift (with kinematic)
from pathlib import Path
from os import system
import torch
from model.library.transformations import drift
from model.library.transformations import kinematic
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
dp = torch.tensor(0.005, dtype=torch.float64)
length = torch.tensor(1.0, dtype=torch.float64)
state = torch.tensor([0.01, -0.005, -0.01, 0.005], dtype=torch.float64)
qx, px, qy, py = state.tolist()
code = f"""
mag:drift,l={length.item()} ;
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact=true ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=false ;
ptc_align;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp.item()},t=0.0 ;
ptc_track,icase=6,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}};
ptc_track_end;
ptc_end;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
state = drift(state, dp, length)
state = kinematic(state, dp, length)
res = state
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.005024752473723395, -0.005, -0.005024752473723395, 0.005]
[0.005024752473723394, -0.005, -0.005024752473723394, 0.005]
[8.673617379884035e-19, 0.0, -8.673617379884035e-19, 0.0]
[5]:
# corrector
from pathlib import Path
from os import system
import torch
from model.library.transformations import corrector
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
dp = torch.tensor(0.005, dtype=torch.float64)
kx = -torch.tensor(0.1, dtype=torch.float64)
ky = +torch.tensor(0.1, dtype=torch.float64)
state = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
qx, px, qy, py = state.tolist()
code = f"""
magx:hkicker,l=0.0,kick={kx.item()};
magy:vkicker,l=0.0,kick={ky.item()};
map:line=(magx, magy) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact=false ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=false ;
ptc_align;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp.item()},t=0.0 ;
ptc_track,icase=6,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}};
ptc_track_end;
ptc_end;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
res = corrector(state, kx, ky)
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.0, -0.1, 0.0, 0.1]
[0.0, -0.1, 0.0, 0.1]
[0.0, 0.0, 0.0, 0.0]
[6]:
# focusing quadrupole
from pathlib import Path
from os import system
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
import torch
from model.library.transformations import fquad
kn = torch.tensor(1.0, dtype=torch.float64)
dp = torch.tensor(0.005, dtype=torch.float64)
length = torch.tensor(1.0, dtype=torch.float64)
state = torch.tensor([0.01, -0.005, -0.01, 0.005], dtype=torch.float64)
qx, px, qy, py = state.tolist()
code = f"""
mag:quadrupole,l={length.item()}, k1={kn.item()};
map:line=(mag) ;
beam,energy=1.0E+9,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact=false ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=false ;
ptc_align;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp.item()},t=0.0 ;
ptc_track,icase=6,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}};
ptc_track_end;
ptc_end;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
res = fquad(state, kn.abs(), dp, length)
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.0012338134845463512, -0.011134185772061586, -0.009559363509475737, -0.004042070986490389]
[0.0012338134845463642, -0.01113418577206157, -0.009559363509475702, -0.0040420709864903495]
[-1.3010426069826053e-17, -1.5612511283791264e-17, -3.469446951953614e-17, -3.9898639947466563e-17]
[7]:
# defocusing quadrupole
from pathlib import Path
from os import system
import torch
from model.library.transformations import dquad
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
kn = torch.tensor(-1.0, dtype=torch.float64)
dp = torch.tensor(0.005, dtype=torch.float64)
length = torch.tensor(1.0, dtype=torch.float64)
state = torch.tensor([0.01, -0.005, -0.01, 0.005], dtype=torch.float64)
qx, px, qy, py = state.tolist()
code = f"""
mag:quadrupole,l={length.item()}, k1={kn.item()};
map:line=(mag) ;
beam,energy=1.0E+9,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact=false ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=false ;
ptc_align;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp.item()},t=0.0 ;
ptc_track,icase=6,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}};
ptc_track_end;
ptc_end;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
res = dquad(state, kn.abs(), dp, length)
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.009559363509475737, 0.004042070986490389, -0.0012338134845463512, 0.011134185772061586]
[0.009559363509475702, 0.0040420709864903495, -0.0012338134845463642, 0.01113418577206157]
[3.469446951953614e-17, 3.9898639947466563e-17, 1.3010426069826053e-17, 1.5612511283791264e-17]
[8]:
# generic quadrupole
from pathlib import Path
from os import system
import torch
from model.library.transformations import quadrupole
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
kn = torch.tensor(-1.0, dtype=torch.float64)
ks = torch.tensor(+1.0, dtype=torch.float64)
dp = torch.tensor(0.005, dtype=torch.float64)
length = torch.tensor(1.0, dtype=torch.float64)
state = torch.tensor([0.01, -0.005, -0.01, 0.005], dtype=torch.float64)
qx, px, qy, py = state.tolist()
code = f"""
mag: quadrupole, l={length.item()},k1={kn.item()},k1s={ks.item()};
map:line=(mag) ;
beam,energy=1.0E+9,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact=false ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=false ;
ptc_align;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp.item()},t=0.0 ;
ptc_track,icase=6,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}};
ptc_track_end;
ptc_end;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
res = quadrupole(state, kn, ks, dp, length)
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.00576876084434182, -0.0020884471766207963, 0.002582224887596925, 0.017416187766128223]
[0.005768760844341825, -0.0020884471766207725, 0.0025822248875969544, 0.0174161877661282]
[-5.204170427930421e-18, -2.3852447794681098e-17, -2.949029909160572e-17, 2.42861286636753e-17]
[9]:
# generic linear transformation
import torch
from model.library.transformations import quadrupole
from model.library.transformations import linear
kn = torch.tensor(-1.0, dtype=torch.float64)
ks = torch.tensor(+1.0, dtype=torch.float64)
dp = torch.tensor(0.005, dtype=torch.float64)
length = torch.tensor(1.0, dtype=torch.float64)
state = torch.tensor([0.01, -0.005, -0.01, 0.005], dtype=torch.float64)
vector = torch.zeros_like(state)
matrix = torch.func.jacrev(quadrupole)(0.0*state, kn, ks, dp, length)
ref = quadrupole(state, kn, ks, dp, length)
res = linear(state, vector, matrix)
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
[0.005768760844341825, -0.0020884471766207725, 0.0025822248875969544, 0.0174161877661282]
[0.005768760844341825, -0.0020884471766207725, 0.0025822248875969544, 0.0174161877661282]
[0.0, 0.0, 0.0, 0.0]
[10]:
# quadrupole kick
from pathlib import Path
from os import system
import torch
from model.library.transformations import gradient
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
kn = torch.tensor(1.5, dtype=torch.float64)
ks = torch.tensor(1.0, dtype=torch.float64)
dp = torch.tensor(0.005, dtype=torch.float64)
length = torch.tensor(1.0, dtype=torch.float64)
state = torch.tensor([0.01, -0.005, -0.05, 0.001], dtype=torch.float64)
qx, px, qy, py = state.tolist()
code = f"""
mag: multipole,knl={{0.0,{(kn*length).item()}}},ksl={{0.0,{(ks*length).item()}}};
map:line=(mag) ;
beam,energy=1.0E+9,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact=false ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=false ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp.item()},t=0.0 ;
ptc_track,icase=6,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}};
ptc_track_end;
ptc_end;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
res = gradient(state, kn, ks, length)
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.01, -0.07, -0.05, -0.06400000000000002]
[0.01, -0.07, -0.05, -0.06400000000000002]
[0.0, 0.0, 0.0, 0.0]
[11]:
# sextupole kick
from pathlib import Path
from os import system
import torch
from model.library.transformations import sextupole
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
ks = torch.tensor(0.5, dtype=torch.float64)
dp = torch.tensor(0.005, dtype=torch.float64)
length = torch.tensor(1.0, dtype=torch.float64)
state = torch.tensor([0.01, -0.005, -0.05, 0.001], dtype=torch.float64)
qx, px, qy, py = state.tolist()
code = f"""
mag: multipole,knl={{0.0,0.0,{(ks*length).item()}}};
map:line=(mag) ;
beam,energy=1.0E+9,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact=false ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=false ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp.item()},t=0.0 ;
ptc_track,icase=6,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}};
ptc_track_end;
ptc_end;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
res = sextupole(state, ks, length)
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.01, -0.0044, -0.05, 0.00075]
[0.01, -0.0044, -0.05, 0.00075]
[0.0, 0.0, 0.0, 0.0]
[12]:
# octupole kick
import torch
from model.library.transformations import octupole
from pathlib import Path
from os import system
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
ko = torch.tensor(5.0, dtype=torch.float64)
dp = torch.tensor(0.005, dtype=torch.float64)
length = torch.tensor(1.0, dtype=torch.float64)
state = torch.tensor([0.01, -0.005, -0.05, 0.001], dtype=torch.float64)
qx, px, qy, py = state.tolist()
code = f"""
mag: multipole,knl={{0.0,0.0,0.0,{(ko*length).item()}}};
map:line=(mag) ;
beam,energy=1.0E+9,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact=false ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=false ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp.item()},t=0.0 ;
ptc_track,icase=6,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}};
ptc_track_end;
ptc_end;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
res = octupole(state, ko, length)
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.01, -0.004938333333333334, -0.05, 0.0010916666666666668]
[0.01, -0.004938333333333334, -0.05, 0.0010916666666666668]
[0.0, 0.0, 0.0, 0.0]
[13]:
# pure dipole (no edge effects if e1 = e2 = 0)
from pathlib import Path
from os import system
import torch
from model.library.transformations import dipole
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
angle = torch.tensor(0.1, dtype=torch.float64 )
dp = torch.tensor(0.005, dtype=torch.float64)
length = torch.tensor(1.0, dtype=torch.float64)
state = torch.tensor([0.01, -0.005, -0.01, 0.005], dtype=torch.float64)
qx, px, qy, py = state.tolist()
code = f"""
mag: sbend, l={length.item()}, angle={angle.item()},k1=0.0,k1s=0.0,e1=0.0,e2=0.0,kill_ent_fringe=false,kill_exi_fringe=false;
map:line=(mag) ;
beam,energy=1.0E+9,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact=false ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=false ;
ptc_align;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp.item()},t=0.0 ;
ptc_track,icase=6,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}};
ptc_track_end;
ptc_end;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
res = dipole(state, length/angle, dp, length)
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.005231962156363519, -0.004575808017791941, -0.005024875621890682, 0.005]
[0.005231962156363559, -0.004575808017791928, -0.005024875621890547, 0.005]
[-3.9898639947466563e-17, -1.3010426069826053e-17, -1.3530843112619095e-16, 0.0]
[14]:
# combined function dipole (no edge effects if e1 = e2 = 0)
from pathlib import Path
from os import system
import torch
from model.library.transformations import bend
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
angle = torch.tensor(0.1, dtype=torch.float64)
kn = torch.tensor(-1.0, dtype=torch.float64 )
ks = torch.tensor(0.5, dtype=torch.float64 )
dp = torch.tensor(0.005, dtype=torch.float64)
length = torch.tensor(1.0, dtype=torch.float64)
state = torch.tensor([0.01, -0.005, -0.01, 0.005], dtype=torch.float64)
qx, px, qy, py = state.tolist()
code = f"""
mag: sbend, l={length.item()}, angle={angle.item()},k1={kn.item()},k1s={ks.item()},e1=0.0,e2=0.0,kill_ent_fringe=false,kill_exi_fringe=false;
map:line=(mag) ;
beam,energy=1.0E+9,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact=false ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=false ;
ptc_align;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp.item()},t=0.0 ;
ptc_track,icase=6,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}};
ptc_track_end;
ptc_end;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
res = bend(state, length/angle, kn, ks, dp, length)
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.007795176039169286, 0.0011097346020520168, 0.0007677684542948365, 0.01462661777023533]
[0.0077951760391692755, 0.0011097346020520064, 0.0007677684542948021, 0.014626617770235346]
[1.0408340855860843e-17, 1.0408340855860843e-17, 3.436920886779049e-17, -1.5612511283791264e-17]
[15]:
# combined function dipole with edge effects
from pathlib import Path
from os import system
import torch
from model.library.transformations import bend
from model.library.transformations import wedge
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
angle = torch.tensor(0.1, dtype=torch.float64)
kn = torch.tensor(-1.0, dtype=torch.float64)
ks = torch.tensor(0.5, dtype=torch.float64)
dp = torch.tensor(0.005, dtype=torch.float64)
e1 = torch.tensor(0.02, dtype=torch.float64)
e2 = torch.tensor(-0.03, dtype=torch.float64)
length = torch.tensor(2.5, dtype=torch.float64)
state = torch.tensor([0.01, -0.005, -0.01, 0.005], dtype=torch.float64)
qx, px, qy, py = state.tolist()
code = f"""
mag: sbend, l={length.item()}, angle={angle.item()},k1={kn.item()},k1s={ks.item()},e1={e1.item()},e2={e2.item()},kill_ent_fringe=false,kill_exi_fringe=false;
map:line=(mag) ;
beam,energy=1.0E+9,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact=false ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=false ;
ptc_align;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp.item()},t=0.0 ;
ptc_track,icase=6,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}};
ptc_track_end;
ptc_end;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
state = wedge(state, e1, length/angle)
state = bend(state, length/angle, kn + 1.0E-16, ks + 1.0E-16, dp, length)
res = wedge(state, e2, length/angle)
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.02505664248885726, 0.02888471799554683, 0.01948347950480536, 0.007752605073815676]
[0.025056642488857035, 0.028884717995546608, 0.019483479504805307, 0.007752605073815616]
[2.255140518769849e-16, 2.220446049250313e-16, 5.204170427930421e-17, 5.984795992119984e-17]
[16]:
# translations (exact alignment, straight layout, act on a thin representation at the entrance frame)
from pathlib import Path
from os import system
import torch
from model.library.transformations import drift
from model.library.transformations import quadrupole
from model.library.transformations import tx, ty, tz
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
angle = torch.tensor(0.1, dtype=torch.float64)
kn = torch.tensor(-1.0, dtype=torch.float64)
ks = torch.tensor(0.5, dtype=torch.float64)
dp = torch.tensor(0.005, dtype=torch.float64)
length = torch.tensor(2.5, dtype=torch.float64)
state = torch.tensor([0.01, -0.005, -0.015, 0.0025], dtype=torch.float64)
dx = torch.tensor(0.01, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
qx, px, qy, py = state.tolist()
code = f"""
dr: drift, l=1.0;
mag: quadrupole, l={length.item()},k1={kn.item()},k1s={ks.item()};
map:line=(dr, mag, dr) ;
beam,energy=1.0E+9,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag";
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()};
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact=false ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp.item()},t=0.0 ;
ptc_track,icase=6,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}};
ptc_track_end;
ptc_end;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
state = drift(state, dp, 1.0)
state = tx(state, +dx)
state = ty(state, +dy)
state = tz(state, +dz, dp)
state = quadrupole(state, kn, ks, dp, length)
state = tz(state, -dz, dp)
state = ty(state, -dy)
state = tx(state, -dx)
state = drift(state, dp, 1.0)
res = state
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[-0.08749190399027759, -0.05149961687573391, -0.05640828383591964, -0.019912883990595223]
[-0.08749190399027745, -0.05149961687573378, -0.05640828383591953, -0.01991288399059518]
[-1.3877787807814457e-16, -1.249000902703301e-16, -1.1102230246251565e-16, -4.163336342344337e-17]
[17]:
# translations + rotations (exact alignment, straight layout, act on a thin representation at the entrance frame)
from pathlib import Path
from os import system
import torch
from model.library.transformations import quadrupole
from model.library.transformations import tx, ty, tz
from model.library.transformations import rx, ry, rz
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
kn = torch.tensor(-1.0, dtype=torch.float64)
ks = torch.tensor(0.5, dtype=torch.float64)
dp = torch.tensor(0.005, dtype=torch.float64)
length = torch.tensor(2.5, dtype=torch.float64)
state = torch.tensor([0.01, -0.005, -0.015, 0.0025], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
qx, px, qy, py = state.tolist()
code = f"""
mag:quadrupole,l={length.item()},k1={kn.item()},k1s={ks.item()};
map:line=(mag) ;
beam,energy=1.0E+9,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag";
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()};
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact=false ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true;
ptc_align;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp.item()},t=0.0 ;
ptc_track,icase=6,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}};
ptc_track_end;
ptc_end;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
state = tx(state, +dx)
state = ty(state, +dy)
state = tz(state, +dz, dp)
state = rx(state, +wx, dp)
state = ry(state, +wy, dp)
state = rz(state, +wz)
state = quadrupole(state, kn + 1.0E-16, ks + 1.0E-16, dp, length)
state = tz(state, -length, dp)
state = rz(state, -wz)
state = ry(state, -wy, dp)
state = rx(state, -wx, dp)
state = tz(state, -dz, dp)
state = ty(state, -dy)
state = tx(state, -dx)
state = tz(state, +length, dp)
res = state
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[-0.19014967849021078, -0.2611883141418841, -0.10367399923762718, -0.09101974096085057]
[-0.19014967849022751, -0.2611883141418846, -0.10367399923763249, -0.09101974096085078]
[1.6736612096224235e-14, 4.996003610813204e-16, 5.3013149425851225e-15, 2.0816681711721685e-16]
[18]:
# translations + rotations (exact alignment, curved layout, act on a thin representation at the entrance frame)
from pathlib import Path
from os import system
import torch
from model.library.transformations import bend
from model.library.transformations import wedge
from model.library.transformations import tx, ty, tz
from model.library.transformations import rx, ry, rz
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
angle = torch.tensor(0.1, dtype=torch.float64)
kn = torch.tensor(-1.0, dtype=torch.float64)
ks = torch.tensor(0.5, dtype=torch.float64)
dp = torch.tensor(0.005, dtype=torch.float64)
e1 = torch.tensor(0.005, dtype=torch.float64)
e2 = torch.tensor(0.005, dtype=torch.float64)
length = torch.tensor(2.5, dtype=torch.float64)
state = torch.tensor([0.01, -0.005, -0.015, 0.0025], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.01, dtype=torch.float64)
qx, px, qy, py = state.tolist()
code = f"""
mag:sbend,l={length.item()},angle={angle.item()},k1={kn.item()},k1s={ks.item()},e1={e1.item()},e2={e2.item()},kill_ent_fringe=false,kill_exi_fringe=false;
map:line=(mag) ;
beam,energy=1.0E+9,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag";
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()};
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact=false ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true;
ptc_align;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp.item()},t=0.0 ;
ptc_track,icase=6,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}};
ptc_track_end;
ptc_end;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
state = tx(state, +dx)
state = ty(state, +dy)
state = tz(state, +dz, dp)
state = rx(state, +wx, dp)
state = ry(state, +wy, dp)
state = rz(state, +wz)
state = wedge(state, e1, length/angle)
state = bend(state, length/angle, kn + 1.0E-16, ks + 1.0E-16, dp, length)
state = wedge(state, e2, length/angle)
state = ry(state, +angle/2, dp)
state = tz(state, -2.0*length/angle*(angle/2.0).sin(), dp)
state = ry(state, +angle/2, dp)
state = rz(state, -wz)
state = ry(state, -wy, dp)
state = rx(state, -wx, dp)
state = tz(state, -dz, dp)
state = ty(state, -dy)
state = tx(state, -dx)
state = ry(state, -angle/2, dp)
state = tz(state, +2.0*length/angle*(angle/2.0).sin(), dp)
state = ry(state, -angle/2, dp)
res = state
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[-0.20185873553633701, -0.27629369448112884, -0.08354566211146026, -0.06880534321809641]
[-0.20185873553633754, -0.2762936944811289, -0.08354566211146025, -0.06880534321809621]
[5.273559366969494e-16, 5.551115123125783e-17, -1.3877787807814457e-17, -1.942890293094024e-16]
[19]:
# exact sector bend (without fringe)
from pathlib import Path
from os import system
import torch
from model.library.transformations import sector_bend
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
length = 2.5
angle = 0.1
e1 = 0.0
e2 = 0.0
dp = 0.005
state = torch.tensor([0.01, -0.0005, -0.01, 0.0005], dtype=torch.float64)
qx, px, qy, py = state.tolist()
code = f"""
mag:sbend,l={length},angle={angle},e1={e1},e2={e2},kill_ent_fringe=true,kill_exi_fringe=true;
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact=true ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=6,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}};
ptc_track_end;
ptc_end;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
length = torch.tensor(length, dtype=torch.float64)
angle = torch.tensor(angle, dtype=torch.float64)
e1 = torch.tensor(e1, dtype=torch.float64)
e2 = torch.tensor(e2, dtype=torch.float64)
dp = torch.tensor(dp, dtype=torch.float64)
state = sector_bend(state, length/angle, dp, length)
res = state
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.00932966343120269, -3.829320024990772e-05, -0.008755742622854638, 0.0005]
[0.009329663431209667, -3.829320024994158e-05, -0.008755742622854576, 0.0005]
[-6.977057820378718e-15, 3.386098909943791e-17, -6.245004513516506e-17, 0.0]
[20]:
# exact sector bend (with fringe)
from pathlib import Path
from os import system
import torch
from model.library.transformations import sector_bend
from model.library.transformations import sector_bend_fringe
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
length = 2.5
angle = 0.1
e1 = 0.0
e2 = 0.0
dp = 0.005
state = torch.tensor([0.01, -0.0005, -0.01, 0.0005], dtype=torch.float64)
qx, px, qy, py = state.tolist()
code = f"""
mag:sbend,l={length},angle={angle},e1={e1},e2={e2},kill_ent_fringe=false,kill_exi_fringe=false;
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact=true ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=6,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}};
ptc_track_end;
ptc_end;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
length = torch.tensor(length, dtype=torch.float64)
angle = torch.tensor(angle, dtype=torch.float64)
e1 = torch.tensor(e1, dtype=torch.float64)
e2 = torch.tensor(e2, dtype=torch.float64)
dp = torch.tensor(dp, dtype=torch.float64)
state = sector_bend_fringe(state, +length/angle, dp)
state = sector_bend(state, length/angle, dp, length)
state = sector_bend_fringe(state, -length/angle, dp)
res = state
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.00933011773950498, -3.830113730822001e-05, -0.008756237750526722, 0.0004998143432367524]
[0.009330117739498277, -3.8301137308233764e-05, -0.008756237750526754, 0.0004998143432367524]
[6.702971511174383e-15, 1.3755815063409838e-17, 3.122502256758253e-17, 0.0]
[21]:
# exact sector bend (with fringe and wedges)
from pathlib import Path
from os import system
import torch
from model.library.transformations import sector_bend
from model.library.transformations import sector_bend_fringe
from model.library.transformations import sector_bend_wedge
from model.library.transformations import polar
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
length = 2.5
angle = 0.1
e1 = 0.01
e2 = -0.01
dp = 0.005
state = torch.tensor([0.01, -0.0005, -0.01, 0.0005], dtype=torch.float64)
qx, px, qy, py = state.tolist()
code = f"""
mag:sbend,l={length},angle={angle},e1={e1},e2={e2},kill_ent_fringe=false,kill_exi_fringe=false;
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact=true ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=6,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}};
ptc_track_end;
ptc_end;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
length = torch.tensor(length, dtype=torch.float64)
angle = torch.tensor(angle, dtype=torch.float64)
e1 = torch.tensor(e1, dtype=torch.float64)
e2 = torch.tensor(e2, dtype=torch.float64)
dp = torch.tensor(dp, dtype=torch.float64)
state = polar(state, e1, dp)
state = sector_bend_fringe(state, +length/angle, dp)
state = sector_bend_wedge(state, -e1, length/angle, dp)
state = sector_bend(state, length/angle, dp, length)
state = sector_bend_wedge(state, -e2, length/angle, dp)
state = sector_bend_fringe(state, -length/angle, dp)
state = polar(state, e2, dp)
res = state
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.009340060895391944, -3.805697197357787e-05, -0.00874628326389246, 0.0005003157283896672]
[0.009340060895401722, -3.805697197360909e-05, -0.00874628326389242, 0.0005003157283896674]
[-9.778636234081262e-15, 3.1218246304004493e-17, -3.9898639947466563e-17, -1.0842021724855044e-19]
[22]:
# linear wedge matrix
from model.library.transformations import wedge
from model.library.transformations import polar
from model.library.transformations import sector_bend_fringe
from model.library.transformations import sector_bend_wedge
length = 2.5
angle = 0.1
e1 = 0.01
e2 = -0.01
dp = 0.005
state = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
length = torch.tensor(length, dtype=torch.float64)
angle = torch.tensor(angle, dtype=torch.float64)
e1 = torch.tensor(e1, dtype=torch.float64)
e2 = torch.tensor(e2, dtype=torch.float64)
dp = torch.tensor(dp, dtype=torch.float64)
def wedge_entrance(state):
state = polar(state, e1, dp)
state = sector_bend_fringe(state, +length/angle, dp)
state = sector_bend_wedge(state, -e1, length/angle, dp)
return state
def wedge_exit(state):
state = sector_bend_wedge(state, -e2, length/angle, dp)
state = sector_bend_fringe(state, -length/angle, dp)
state = polar(state, e2, dp)
return state
print(torch.func.jacrev(wedge)(state, e1, length/angle))
print(torch.func.jacrev(wedge_entrance)(state))
print()
print(torch.func.jacrev(wedge)(state, e2, length/angle))
print(torch.func.jacrev(wedge_exit)(state))
print()
tensor([[ 1.0000e+00, 0.0000e+00, 0.0000e+00, 0.0000e+00],
[ 4.0001e-04, 1.0000e+00, 0.0000e+00, 0.0000e+00],
[ 0.0000e+00, 0.0000e+00, 1.0000e+00, 0.0000e+00],
[ 0.0000e+00, 0.0000e+00, -4.0001e-04, 1.0000e+00]],
dtype=torch.float64)
tensor([[ 1.0000e+00, 5.5508e-17, 0.0000e+00, 0.0000e+00],
[ 4.0001e-04, 1.0000e+00, 0.0000e+00, 0.0000e+00],
[ 0.0000e+00, 0.0000e+00, 1.0000e+00, 0.0000e+00],
[ 0.0000e+00, 0.0000e+00, -4.0001e-04, 1.0000e+00]],
dtype=torch.float64)
tensor([[ 1.0000e+00, 0.0000e+00, 0.0000e+00, 0.0000e+00],
[-4.0001e-04, 1.0000e+00, 0.0000e+00, 0.0000e+00],
[ 0.0000e+00, 0.0000e+00, 1.0000e+00, 0.0000e+00],
[ 0.0000e+00, 0.0000e+00, 4.0001e-04, 1.0000e+00]],
dtype=torch.float64)
tensor([[ 1.0000e+00, 0.0000e+00, 0.0000e+00, 0.0000e+00],
[-4.0001e-04, 1.0000e+00, 0.0000e+00, 0.0000e+00],
[ 0.0000e+00, 0.0000e+00, 1.0000e+00, 5.5234e-17],
[ 0.0000e+00, 0.0000e+00, 4.0001e-04, 1.0000e+00]],
dtype=torch.float64)
Example-05: Drift (element)
[1]:
# Comparison of drift element with MADX-PTC and other features
[2]:
from pathlib import Path
from os import system
import torch
from model.library.drift import Drift
[3]:
# Tracking (paraxial)
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
exact = False
align = False
dp = 0.005
length = 1.5
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
qx, px, qy, py = state.tolist()
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.05, dtype=torch.float64)
wx = align*torch.tensor(0.005, dtype=torch.float64)
wy = align*torch.tensor(-0.005, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
code = f"""
mag:drift,l={length} ;
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag" ;
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()} ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact={str(exact).lower()} ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=5,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}} ;
ptc_track_end ;
ptc_end ;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
D = Drift('D', length=length, dp=dp, exact=exact)
res = D(state, alignment=align, data={**D.table(), **error})
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.0025373134328358204, -0.005, -0.003507462686567164, 0.001]
[0.0025373134328358204, -0.005, -0.0035074626865671645, 0.001]
[0.0, 0.0, 4.336808689942018e-19, 0.0]
[4]:
# Tracking (exact)
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
exact = True
align = False
dp = 0.005
length = 1.5
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
qx, px, qy, py = state.tolist()
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.05, dtype=torch.float64)
wx = align*torch.tensor(0.005, dtype=torch.float64)
wy = align*torch.tensor(-0.005, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
code = f"""
mag:drift,l={length} ;
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag" ;
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()} ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact={str(exact).lower()} ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=5,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}} ;
ptc_track_end ;
ptc_end ;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
D = Drift('D', length=length, dp=dp, exact=exact)
res = D(state, alignment=align, data={**D.table(), **error})
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.002537217378977325, -0.005, -0.003507443475795465, 0.001]
[0.002537217378977325, -0.005, -0.0035074434757954654, 0.001]
[0.0, 0.0, 4.336808689942018e-19, 0.0]
[5]:
# Tracking (exact, alignment)
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
exact = False
align = True
dp = 0.005
length = 1.5
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
qx, px, qy, py = state.tolist()
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.05, dtype=torch.float64)
wx = align*torch.tensor(0.005, dtype=torch.float64)
wy = align*torch.tensor(-0.005, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
code = f"""
mag:drift,l={length} ;
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag" ;
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()} ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact={str(exact).lower()} ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=5,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}} ;
ptc_track_end ;
ptc_end ;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
D = Drift('D', length=length, dp=dp, exact=exact)
res = D(state, alignment=align, data={**D.table(), **error})
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
# Note, for some reason drift is not invariant under WX ans WY rotations in MADX
[0.0025372170792497145, -0.0049999999999999975, -0.003507395297032926, 0.0010000000000000009]
[0.0025372170792497166, -0.004999999999999999, -0.0035073952970329247, 0.0010000000000000018]
[-2.168404344971009e-18, 1.734723475976807e-18, -1.3010426069826053e-18, -8.673617379884035e-19]
[6]:
# Deviation/error variables
dp = 0.005
length = 1.5
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
D = Drift('D', length, dp)
# Each element has two variant of a call method
# In the first case only state is passed, it is transformed using parameters specified on initializaton
print(D(state))
print()
# Deviation errors can be also passed to call method
# These variables are added to corresponding parameters specified on initializaton
# For example, element lenght can changed
print(D(state, data={**D.table(), **{'dl': torch.tensor(-length, dtype=D.dtype)}}))
print()
# In the above D.table() creates default deviation dictionary (with zero values for each deviaton)
# {**D.table(), **{'dl': torch.tensor(-length, dtype=DR.dtype)}} replaces the 'dl' key value
# Additionaly, alignment errors are passed as deivation variables
# They are used if alignment flag is raised
print(D(state, data={**D.table(), **error}, alignment=True))
print()
# The following elements can be made equivalent using deviation variables
DA = Drift('DA', length, dp)
DB = Drift('DB', length - 0.1, dp)
print(DA(state) - DB(state, data={**DB.table(), **{'dl': torch.tensor(+0.1, dtype=DB.dtype)}}))
tensor([ 0.0025, -0.0050, -0.0035, 0.0010], dtype=torch.float64)
tensor([ 0.0100, -0.0050, -0.0050, 0.0010], dtype=torch.float64)
tensor([ 0.0025, -0.0050, -0.0035, 0.0010], dtype=torch.float64)
tensor([0., 0., 0., 0.], dtype=torch.float64)
[7]:
# Insertion element
# In this mode elements are treated as thin insertions (at the center)
# Using parameters specified on initialization, transport two matrices are computed
# These matrices are used to insert the element
# Input state is transformed from the element center to its entrance
# Next, transformation from the entrance frame to the exit frame is performed
# This transformation can contain errors
# The final step is to transform state from the exit frame back to the element center
# Without errors, this results in identity transformation for linear elements
dp = 0.0
length = 1.5
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
D = Drift('D', length, dp, exact=False, insertion=True)
# Identity transformation without errors
print(D(state) - state)
# Represents effect of an error
print(D(state, data={**D.table(), **{'dl': 0.1}}) - state)
# Exact tracking corresponds to inclusion of kinematic term as errors
D = Drift('D', length, dp, exact=True, insertion=True)
print(D(state) - state)
tensor([0., 0., 0., 0.], dtype=torch.float64)
tensor([-0.0005, 0.0000, 0.0001, 0.0000], dtype=torch.float64)
tensor([-9.7502e-08, 0.0000e+00, 1.9500e-08, 0.0000e+00],
dtype=torch.float64)
[8]:
# Mapping over a set of initial conditions
# Call method can be used to map over a set of initial conditions
# Note, device can be set to cpu or gpu via base element classvariables
dp = 0.0
length = 1.5
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
D = Drift('D', length, dp, exact=True)
state = 1.0E-3*torch.randn((512, 4), dtype=D.dtype, device=D.device)
print(torch.vmap(D)(state).shape)
# To map over deviations parameters a wrapper function (or a lambda expression) can be used
def wrapper(state, dp):
return D(state, data={**D.table(), **{'dp': dp}})
dp = 1.0E-3*torch.randn(512, dtype=D.dtype, device=D.device)
print(torch.vmap(wrapper)(state, dp).shape)
torch.Size([512, 4])
torch.Size([512, 4])
[9]:
# Differentiability
# Both call methods are differentiable
# Derivative with respect to state can be computed directly
# For deviation variables, wrapping is required
dp = 0.0
length = 1.5
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
D = Drift('D', length, dp, exact=False)
# Compute derivative with respect to state
print(torch.func.jacrev(D)(state))
print()
# Compute derivative with respect to a deviation variable
dl = torch.tensor(0.0, dtype=torch.float64)
def wrapper(state, dl):
return D(state, data={**D.table(), **{'dl': dl}})
print(torch.func.jacrev(wrapper, 1)(state, dl))
print()
# Compositional derivative (compute derivative of jacobian trace with respect momentum deviation)
dp = torch.tensor(0.0, dtype=torch.float64)
def trace(state, dp):
return (torch.func.jacrev(lambda state: D(state, data={**D.table(), **{'dp': dp}}))(state)).trace()
torch.func.jacrev(trace, 1)(state, dp)
tensor([[1.0000, 1.5000, 0.0000, 0.0000],
[0.0000, 1.0000, 0.0000, 0.0000],
[0.0000, 0.0000, 1.0000, 1.5000],
[0.0000, 0.0000, 0.0000, 1.0000]], dtype=torch.float64)
tensor([-0.0050, 0.0000, 0.0010, 0.0000], dtype=torch.float64)
[9]:
tensor(-0., dtype=torch.float64)
[10]:
# Output at each step
# It is possible to collect output of state or tangent matrix at each integration step
# Number of integratin steps is controlled by ns parameter on initialization
# Alternatively, desired integration step length can be passed
# Number of integration steps is computed as ceil(length/ds)
dp = 0.0
length = 1.5
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
D = Drift('D', length, dp, exact=False, ns=10, output=True, matrix=True)
# Final state is still returned
print(D(state))
# Data is added to special attributes (state and tangent matrix)
print(D.container_output.shape)
print(D.container_matrix.shape)
# Number of integration steps can be changed
D.ns = 100
D(state)
print(D.container_output.shape)
print(D.container_matrix.shape)
tensor([ 0.0025, -0.0050, -0.0035, 0.0010], dtype=torch.float64)
torch.Size([10, 4])
torch.Size([10, 4, 4])
torch.Size([100, 4])
torch.Size([100, 4, 4])
[11]:
# Integration order is set on initialization (default value is zero)
# This order is related to difference order as 2n + 2
# Thus, zero corresponds to second order difference method
dp = 0.0
length = 1.5
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
D = Drift('D', length, dp, order=1, exact=True)
# For drift integration is performed only with exact flag
# In this case, kinematic term error is added
# This term actually commutes with paraxial drift map
# But integration is still performed for consistency with matrix-kick-matrix split
# Only one integration step is required to get exact result
D.ns = 1
ref = D(state)
D.ns = 10
res = D(state)
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
print()
# Integrator parameters are stored in data attribute (if integration is actually performed)
maps, weights = D._data
print(maps)
print(weights)
[0.002499902498098708, -0.005, -0.003499980499619743, 0.001]
[0.002499902498098709, -0.005, -0.0034999804996197477, 0.001]
[-8.673617379884035e-19, 0.0, 4.7704895589362195e-18, 0.0]
[0, 1, 0, 1, 0, 1, 0]
[0.6756035959798289, 1.3512071919596578, -0.17560359597982877, -1.7024143839193153, -0.17560359597982877, 1.3512071919596578, 0.6756035959798289]
Example-06: Quadrupole (element)
[1]:
# Comparison of quadrupole element with MADX-PTC and other features
[2]:
from pathlib import Path
from os import system
import torch
from model.library.drift import Drift
from model.library.quadrupole import Quadrupole
[3]:
# Tracking (paraxial)
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
exact = False
align = False
kn = - 2.0
ks = + 1.5
dp = 0.005
length = 1.0
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
qx, px, qy, py = state.tolist()
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.05, dtype=torch.float64)
wx = align*torch.tensor(0.005, dtype=torch.float64)
wy = align*torch.tensor(-0.005, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
code = f"""
mag:quadrupole,l={length},k1={kn},k1s={ks} ;
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag" ;
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()} ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact={str(exact).lower()} ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=5,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}} ;
ptc_track_end ;
ptc_end ;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
Q = Quadrupole('Q', length=length, kn=kn, ks=ks, dp=dp, exact=exact)
res = Q(state, alignment=align, data={**Q.table(), **error})
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.012268608165994052, 0.012991610983278109, 0.005825218798687177, 0.01752224400608683]
[0.012268608165994057, 0.012991610983278092, 0.005825218798687172, 0.017522244006086807]
[-5.204170427930421e-18, 1.734723475976807e-17, 5.204170427930421e-18, 2.0816681711721685e-17]
[4]:
# Tracking (exact)
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
exact = True
align = False
kn = - 2.0
ks = + 1.5
dp = 0.005
length = 1.0
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
qx, px, qy, py = state.tolist()
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.05, dtype=torch.float64)
wx = align*torch.tensor(0.005, dtype=torch.float64)
wy = align*torch.tensor(-0.005, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
code = f"""
mag:quadrupole,l={length},k1={kn},k1s={ks} ;
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag" ;
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()} ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact={str(exact).lower()} ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=5,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}} ;
ptc_track_end ;
ptc_end ;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
Q = Quadrupole('Q', length=length, kn=kn, ks=ks, dp=dp, exact=exact, order=5, ns=5)
res = Q(state, alignment=align, data={**Q.table(), **error})
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.012269208914523159, 0.012992157908766264, 0.005826335256074007, 0.017521822791072554]
[0.01226920891452326, 0.012992157908766374, 0.005826335256074149, 0.017521822791072988]
[-1.0061396160665481e-16, -1.0928757898653885e-16, -1.4224732503009818e-16, -4.3368086899420177e-16]
[5]:
# Tracking (exact, alignment)
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
exact = True
align = True
kn = - 2.0
ks = + 1.5
dp = 0.005
length = 1.0
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
qx, px, qy, py = state.tolist()
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.05, dtype=torch.float64)
wx = align*torch.tensor(0.005, dtype=torch.float64)
wy = align*torch.tensor(-0.005, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
code = f"""
mag:quadrupole,l={length},k1={kn},k1s={ks} ;
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag" ;
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()} ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact={str(exact).lower()} ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=5,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}} ;
ptc_track_end ;
ptc_end ;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
Q = Quadrupole('Q', length=length, kn=kn, ks=ks, dp=dp, exact=exact, order=5, ns=5)
res = Q(state, alignment=align, data={**Q.table(), **error})
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[-0.022075488016794924, -0.09165584224601611, -0.04570124622656498, -0.08629975808408008]
[-0.02207548801679439, -0.09165584224601665, -0.04570124622656456, -0.08629975808408233]
[-5.342948306008566e-16, 5.412337245047638e-16, -4.2327252813834093e-16, 2.248201624865942e-15]
[6]:
# Deviation/error variables
kn = - 2.0
ks = + 1.5
dp = 0.005
length = 1.5
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
Q = Quadrupole('Q', length, kn, ks, dp)
# Each element has two variant of a call method
# In the first case only state is passed, it is transformed using parameters specified on initializaton
print(Q(state))
print()
# Deviation errors can be also passed to call method
# These variables are added to corresponding parameters specified on initializaton
# For example, element lenght can changed
print(Q(state, data={**Q.table(), **{'dl': -Q.length}}))
print()
# In the above Q.table() creates default deviation dictionary (with zero values for each deviaton)
# {**Q.table(), **{'dl': -Q.length}} replaces the 'dl' key value
# Additionaly, alignment errors are passed as deivation variables
# They are used if alignment flag is raised
print(Q(state, data={**Q.table(), **error}, alignment=True))
print()
# The following elements can be made equivalent using deviation variables
QA = Quadrupole('QA', length, kn, ks, dp)
QB = Quadrupole('QB', length - 0.1, kn, ks, dp)
print(QA(state) - QB(state, data={**QB.table(), **{'dl': torch.tensor(+0.1, dtype=QB.dtype)}}))
# Note, while in some cases float values can be passed as values to deviation variables
# The correct behaviour in guaranteed only for tensors
tensor([0.0242, 0.0380, 0.0152, 0.0200], dtype=torch.float64)
tensor([ 0.0100, -0.0050, -0.0050, 0.0010], dtype=torch.float64)
tensor([-0.0908, -0.2335, -0.0963, -0.1316], dtype=torch.float64)
tensor([0., 0., 0., 0.], dtype=torch.float64)
[7]:
# Insertion element
# In this mode elements are treated as thin insertions (at the center)
# Using parameters specified on initialization, transport two matrices are computed
# These matrices are used to insert the element
# Input state is transformed from the element center to its entrance
# Next, transformation from the entrance frame to the exit frame is performed
# This transformation can contain errors
# The final step is to transform state from the exit frame back to the element center
# Without errors, this results in identity transformation for linear elements
kn = - 2.0
ks = + 1.5
dp = 0.005
length = 1.5
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
Q = Quadrupole('Q', length, kn, ks, dp, exact=False, insertion=True)
# Identity transformation without errors
print(Q(state) - state)
# Represents effect of an error
print(Q(state, data={**Q.table(), **{'dl': 0.1, 'kn': -0.1}}) - state)
# Exact tracking corresponds to inclusion of kinematic term as errors
Q = Quadrupole('Q', length, kn, ks, dp, exact=True, insertion=True, ns=100, order=1)
print(Q(state) - state)
tensor([-5.5511e-17, 7.4593e-17, -1.4745e-17, 2.7756e-17],
dtype=torch.float64)
tensor([-0.0002, 0.0037, 0.0003, 0.0031], dtype=torch.float64)
tensor([-2.2924e-06, -3.9787e-06, -9.4215e-07, 2.1943e-07],
dtype=torch.float64)
[8]:
# Mapping over a set of initial conditions
# Call method can be used to map over a set of initial conditions
# Note, device can be set to cpu or gpu via base element classvariables
kn = - 2.0
ks = + 1.5
dp = 0.0
length = 1.5
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
Q = Quadrupole('Q', length, kn, ks, dp, exact=True)
state = 1.0E-3*torch.randn((512, 4), dtype=Q.dtype, device=Q.device)
print(torch.vmap(Q)(state).shape)
# To map over deviations parameters a wrapper function (or a lambda expression) can be used
def wrapper(state, dp):
return Q(state, data={**Q.table(), **{'dp': dp}})
dp = 1.0E-3*torch.randn(512, dtype=Q.dtype, device=Q.device)
print(torch.vmap(wrapper)(state, dp).shape)
torch.Size([512, 4])
torch.Size([512, 4])
[9]:
# Differentiability
# Both call methods are differentiable
# Derivative with respect to state can be computed directly
# For deviation variables, wrapping is required
kn = - 2.0
ks = + 1.5
dp = 0.0
length = 1.5
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
Q = Quadrupole('Q', length, kn, ks, dp, exact=False)
# Compute derivative with respect to state
print(torch.func.jacrev(Q)(state))
print()
# Compute derivative with respect to a deviation variable
kn = torch.tensor(0.0, dtype=torch.float64)
def wrapper(state, kn):
return Q(state, data={**Q.table(), **{'kn': kn}})
print(torch.func.jacrev(wrapper, 1)(state, kn))
print()
# Compositional derivative (compute derivative of jacobian trace with respect quadrupole strength)
length = 0.5
knf = +0.2
knd = -0.2
QF = Quadrupole('QF', length, knf)
QD = Quadrupole('QD', length, knd)
DR = Drift('DR', 5.0)
dknf = torch.tensor(0.0, dtype=torch.float64)
dknd = torch.tensor(0.0, dtype=torch.float64)
dkn = torch.stack([dknf, dknd])
def fodo(state, dkn):
dknf, dknd = dkn
state = QF(state, data={**QF.table(), **{'kn': dknf}})
state = DR(state)
state = QD(state, data={**QD.table(), **{'kn': dknd}})
state = QD(state, data={**QD.table(), **{'kn': dknd}})
state = DR(state)
state = QF(state, data={**QF.table(), **{'kn': dknf}})
return state
state = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
def trace(dkn):
return (torch.func.jacrev(fodo)(state, dkn)).trace()
torch.func.jacrev(trace)(dkn)
tensor([[ 4.7923, 3.0672, 1.8367, 0.8757],
[ 7.4479, 4.7923, 2.8495, 1.8367],
[ 1.8367, 0.8757, -0.1057, 0.7321],
[ 2.8495, 1.8367, -0.1507, -0.1057]], dtype=torch.float64)
tensor([-0.0175, -0.0354, -0.0029, -0.0029], dtype=torch.float64)
[9]:
tensor([-12.7901, 12.7901], dtype=torch.float64)
[10]:
# Output at each step
# It is possible to collect output of state or tangent matrix at each integration step
# Number of integratin steps is controlled by ns parameter on initialization
# Alternatively, desired integration step length can be passed
# Number of integration steps is computed as ceil(length/ds)
kn = - 2.0
ks = + 1.5
dp = 0.0
length = 1.5
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
Q = Quadrupole('Q', length, kn, ks, dp, exact=False, ns=10, output=True, matrix=True)
# Final state is still returned
print(Q(state))
# Data is added to special attributes (state and tangent matrix)
print(Q.container_output.shape)
print(Q.container_matrix.shape)
# Number of integration steps can be changed
Q.ns = 100
Q(state)
print(Q.container_output.shape)
print(Q.container_matrix.shape)
tensor([0.0243, 0.0381, 0.0153, 0.0200], dtype=torch.float64)
torch.Size([10, 4])
torch.Size([10, 4, 4])
torch.Size([100, 4])
torch.Size([100, 4, 4])
[11]:
# Integration order is set on initialization (default value is zero)
# This order is related to difference order as 2n + 2
# Thus, zero corresponds to second order difference method
kn = - 2.0
ks = + 1.5
dp = 0.0
length = 1.5
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
Q = Quadrupole('Q', length, kn, ks, dp, order=1, exact=True)
# For quadrupole integration is performed only with exact flag
# In this case, kinematic term error is added
Q.ns = 1
ref = Q(state)
Q.ns = 10
res = Q(state)
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
print()
# Integrator parameters are stored in data attribute (if integration is actually performed)
maps, weights = Q._data
print(maps)
print(weights)
[0.02428427109202266, 0.038113543192801885, 0.015254854998694011, 0.019958320804526662]
[0.02428676414378537, 0.038112599406681553, 0.015255420211007745, 0.019958093271800193]
[-2.493051762711418e-06, 9.437861203318021e-07, -5.652123137335485e-07, 2.275327264690541e-07]
[0, 1, 0, 1, 0, 1, 0]
[0.6756035959798289, 1.3512071919596578, -0.17560359597982877, -1.7024143839193153, -0.17560359597982877, 1.3512071919596578, 0.6756035959798289]
[12]:
# Derivatives of twiss parameters
# pip install git+https://github.com/i-a-morozov/twiss.git@main
from twiss import twiss
length = 0.5
knf = +0.21
knd = -0.19
QF = Quadrupole('QF', length, knf)
QD = Quadrupole('QD', length, knd)
DR = Drift('DR', 5.0)
dknf = torch.tensor(0.0, dtype=torch.float64)
dknd = torch.tensor(0.0, dtype=torch.float64)
dkn = torch.stack([dknf, dknd])
def fodo(state, dkn):
dknf, dknd = dkn
state = QF(state, data={**QF.table(), **{'kn': dknf}})
state = DR(state)
state = QD(state, data={**QD.table(), **{'kn': dknd}})
state = QD(state, data={**QD.table(), **{'kn': dknd}})
state = DR(state)
state = QF(state, data={**QF.table(), **{'kn': dknf}})
return state
state = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
def tune(dkn):
matrix = torch.func.jacrev(fodo)(state, dkn)
tune, *_ = twiss(matrix)
return tune
# Compute tunes and jacobian
values = tune(dkn)
jacobian = torch.func.jacrev(tune)(dkn)
# Test jacobiant
print(values)
print(tune(dkn + 1.0E-3))
print(values + jacobian @ (dkn + 1.0E-3))
tensor([0.2107, 0.1703], dtype=torch.float64)
tensor([0.2126, 0.1681], dtype=torch.float64)
tensor([0.2126, 0.1681], dtype=torch.float64)
Example-07: Sextupole (element)
[20]:
# Comparison of sextupole element with MADX-PTC and other features
[21]:
from pathlib import Path
from os import system
import torch
from model.library.drift import Drift
from model.library.quadrupole import Quadrupole
from model.library.sextupole import Sextupole
[22]:
# Tracking (paraxial)
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
exact = False
align = False
ms = 10.0
dp = 0.005
length = 0.25
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
qx, px, qy, py = state.tolist()
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.05, dtype=torch.float64)
wx = align*torch.tensor(0.005, dtype=torch.float64)
wy = align*torch.tensor(-0.005, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
code = f"""
mag: sextupole, l={length},k2={ms} ;
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag" ;
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()} ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact={str(exact).lower()} ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=5,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}} ;
ptc_track_end ;
ptc_end ;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
S = Sextupole('S', length=length, ms=ms, dp=dp, exact=exact, order=5, ns=10)
res = S(state, alignment=align, data={**S.table(), **error})
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.008745689261382875, -0.005080234821325765, -0.00476590910682766, 0.0008855562050471031]
[0.008745689261382871, -0.00508023482132578, -0.00476590910682768, 0.0008855562050471008]
[3.469446951953614e-18, 1.5612511283791264e-17, 1.9949319973733282e-17, 2.2768245622195593e-18]
[23]:
# Tracking (exact)
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
exact = True
align = False
ms = 10.0
dp = 0.005
length = 0.25
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
qx, px, qy, py = state.tolist()
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.05, dtype=torch.float64)
wx = align*torch.tensor(0.005, dtype=torch.float64)
wy = align*torch.tensor(-0.005, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
code = f"""
mag: sextupole, l={length},k2={ms} ;
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag" ;
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()} ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact={str(exact).lower()} ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=5,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}} ;
ptc_track_end ;
ptc_end ;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
S = Sextupole('S', length=length, ms=ms, dp=dp, exact=exact, order=5, ns=10)
res = S(state, alignment=align, data={**S.table(), **error})
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.008745672936611987, -0.005080234654232574, -0.004765906047078759, 0.000885556338827788]
[0.00874567293661202, -0.0050802346542325495, -0.0047659060470788064, 0.0008855563388277869]
[-3.2959746043559335e-17, -2.42861286636753e-17, 4.7704895589362195e-17, 1.0842021724855044e-18]
[24]:
# Tracking (exact, alignment)
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
exact = True
align = True
ms = 10.0
dp = 0.005
length = 0.25
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
qx, px, qy, py = state.tolist()
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.05, dtype=torch.float64)
wx = align*torch.tensor(0.005, dtype=torch.float64)
wy = align*torch.tensor(-0.005, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
code = f"""
mag: sextupole, l={length},k2={ms} ;
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag" ;
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()} ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact={str(exact).lower()} ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=5,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}} ;
ptc_track_end ;
ptc_end ;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
S = Sextupole('S', length=length, ms=ms, dp=dp, exact=exact, order=5, ns=10)
res = S(state, alignment=align, data={**S.table(), **error})
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.008663885569968804, -0.006258052120536049, -0.004896687680053297, -0.000915022709372755]
[0.008663885569968922, -0.006258052120536033, -0.004896687680053253, -0.000915022709372733]
[-1.1796119636642288e-16, -1.6479873021779667e-17, -4.423544863740858e-17, -2.200930410145574e-17]
[25]:
# Deviation/error variables
ms = 10.0
dp = 0.005
length = 0.25
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
S = Sextupole('S', length, ms, dp)
# Each element has two variant of a call method
# In the first case only state is passed, it is transformed using parameters specified on initializaton
print(S(state))
print()
# Deviation errors can be also passed to call method
# These variables are added to corresponding parameters specified on initializaton
# For example, element lenght can changed
print(S(state, data={**S.table(), **{'dl': -S.length}}))
print()
# In the above S.table() creates default deviation dictionary (with zero values for each deviaton)
# {**S.table(), **{'dl': -S.length}} replaces the 'dl' key value
# Additionaly, alignment errors are passed as deivation variables
# They are used if alignment flag is raised
print(S(state, data={**S.table(), **error}, alignment=True))
print()
# The following elements can be made equivalent using deviation variables
SA = Sextupole('SA', length, ms, dp)
SB = Sextupole('SB', length - 0.1, ms, dp)
print(SA(state) - SB(state, data={**SB.table(), **{'dl': torch.tensor(+0.1, dtype=SB.dtype)}}))
# Note, while in some cases float values can be passed as values to deviation variables
# The correct behaviour in guaranteed only for tensors
tensor([ 0.0087, -0.0051, -0.0048, 0.0009], dtype=torch.float64)
tensor([ 0.0100, -0.0050, -0.0050, 0.0010], dtype=torch.float64)
tensor([ 0.0087, -0.0062, -0.0049, -0.0009], dtype=torch.float64)
tensor([0., 0., 0., 0.], dtype=torch.float64)
[26]:
# Insertion element
# In this mode elements are treated as thin insertions (at the center)
# Using parameters specified on initialization, transport two matrices are computed
# These matrices are used to insert the element
# Input state is transformed from the element center to its entrance
# Next, transformation from the entrance frame to the exit frame is performed
# This transformation can contain errors
# The final step is to transform state from the exit frame back to the element center
# Without errors, this results in identity transformation for linear elements
ms = 10.0
dp = 0.005
length = 1.5
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
S = Sextupole('S', length, ms, dp, exact=False, insertion=True)
# Since sextupole is a nonlinear element, insertion is an identity transformation only for zero strenght
print(S(state) - state)
print(S(state, data={**S.table(), **{'ms': -ms}}) - state)
# Represents effect of an error (any nonzero value of strengh or a change in other parameter)
print(S(state, data={**S.table(), **{'dl': 0.1}}) - state)
# Exact tracking corresponds to inclusion of kinematic term as errors
S = Sextupole('S', length, ms, dp, exact=True, insertion=True, ns=100, order=1)
print(S(state) - state)
tensor([ 0.0000, -0.0006, 0.0000, -0.0008], dtype=torch.float64)
tensor([0., 0., 0., 0.], dtype=torch.float64)
tensor([-5.2560e-04, -5.6465e-04, 6.1078e-05, -7.7234e-04],
dtype=torch.float64)
tensor([-1.3875e-04, -5.5306e-04, -9.3764e-05, -7.7778e-04],
dtype=torch.float64)
[27]:
# Mapping over a set of initial conditions
# Call method can be used to map over a set of initial conditions
# Note, device can be set to cpu or gpu via base element classvariables
ms = 10.0
dp = 0.0
length = 1.5
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
S = Sextupole('S', length, ms, dp, exact=True)
state = 1.0E-3*torch.randn((512, 4), dtype=S.dtype, device=S.device)
print(torch.vmap(S)(state).shape)
# To map over deviations parameters a wrapper function (or a lambda expression) can be used
def wrapper(state, dp):
return S(state, data={**S.table(), **{'dp': dp}})
dp = 1.0E-3*torch.randn(512, dtype=S.dtype, device=S.device)
print(torch.vmap(wrapper)(state, dp).shape)
torch.Size([512, 4])
torch.Size([512, 4])
[28]:
# Differentiability
# Both call methods are differentiable
# Derivative with respect to state can be computed directly
# For deviation variables, wrapping is required
ms = 10.0
dp = 0.0
length = 1.5
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
S = Sextupole('S', length, ms, dp, exact=False)
# Compute derivative with respect to state
print(torch.func.jacrev(S)(state))
print()
# Compute derivative with respect to a deviation variable
ms = torch.tensor(0.0, dtype=torch.float64)
def wrapper(state, ms):
return S(state, data={**S.table(), **{'ms': ms}})
print(torch.func.jacrev(wrapper, 1)(state, ms))
print()
tensor([[ 0.9297, 1.4473, -0.0478, -0.0359],
[-0.0938, 0.9297, -0.0638, -0.0478],
[-0.0478, -0.0359, 1.0703, 1.5527],
[-0.0638, -0.0478, 0.0938, 1.0703]], dtype=torch.float64)
tensor([-1.1813e-05, -1.5750e-05, -2.9883e-05, -3.9844e-05],
dtype=torch.float64)
[29]:
# Output at each step
# It is possible to collect output of state or tangent matrix at each integration step
# Number of integratin steps is controlled by ns parameter on initialization
# Alternatively, desired integration step length can be passed
# Number of integration steps is computed as ceil(length/ds)
ms = 10.0
dp = 0.0
length = 1.5
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
S = Sextupole('S', length, ms, dp, exact=False, ns=10, output=True, matrix=True)
# Final state is still returned
print(S(state))
# Data is added to special attributes (state and tangent matrix)
print(S.container_output.shape)
print(S.container_matrix.shape)
# Number of integration steps can be changed
S.ns = 100
S(state)
print(S.container_output.shape)
print(S.container_matrix.shape)
tensor([ 0.0023, -0.0052, -0.0039, 0.0006], dtype=torch.float64)
torch.Size([10, 4])
torch.Size([10, 4, 4])
torch.Size([100, 4])
torch.Size([100, 4, 4])
[30]:
# Integration order is set on initialization (default value is zero)
# This order is related to difference order as 2n + 2
# Thus, zero corresponds to second order difference method
ms = 10.0
dp = 0.0
length = 1.5
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
S = Sextupole('S', length, ms, dp, order=0, exact=True)
# For sextupole integration is always performed
# In exact case, kinematic term error is added
S.ns = 10
ref = S(state)
S.ns = 100
res = S(state)
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
print()
# Integrator parameters are stored in data attribute (if integration is actually performed)
maps, weights = S._data
print(maps)
print(weights)
[0.0022880403040043407, -0.005176627884407675, -0.0038882248469424585, 0.0005834231060909752]
[0.0022871610802911667, -0.005176794799148338, -0.0038891562083014203, 0.0005832353574511327]
[8.792237131739246e-07, 1.6691474066278522e-07, 9.313613589618727e-07, 1.877486398425181e-07]
[0, 1, 2, 1, 0]
[0.5, 0.5, 1.0, 0.5, 0.5]
[31]:
# Derivatives of twiss parameters (chromaticity)
# pip install git+https://github.com/i-a-morozov/twiss.git@main
# pip install git+https://github.com/i-a-morozov/ndmap.git@main
from twiss import twiss
from ndmap.pfp import parametric_fixed_point
from ndmap.evaluate import evaluate
# Define elements
QF = Quadrupole('QF', 0.5, +0.21)
QD = Quadrupole('QD', 0.5, -0.19)
SF = Sextupole('SF', 0.25)
SD = Sextupole('SD', 0.25)
DA = Drift('DR', 0.25)
DB = Drift('DR', 4.00)
# Define one-turn transformation
def fodo(state, dp, ms):
dp, *_ = dp
msf, msd, *_ = ms
state = QF(state, data={**QF.table(), **{'dp': dp}})
state = DA(state, data={**DA.table(), **{'dp': dp}})
state = SF(state, data={**SF.table(), **{'dp': dp, 'ms': msf}})
state = DB(state, data={**DB.table(), **{'dp': dp}})
state = SD(state, data={**SD.table(), **{'dp': dp, 'ms': msd}})
state = DA(state, data={**DA.table(), **{'dp': dp}})
state = QD(state, data={**QD.table(), **{'dp': dp}})
state = QD(state, data={**QD.table(), **{'dp': dp}})
state = DA(state, data={**DA.table(), **{'dp': dp}})
state = SD(state, data={**SD.table(), **{'dp': dp, 'ms': msd}})
state = DB(state, data={**DB.table(), **{'dp': dp}})
state = SF(state, data={**SF.table(), **{'dp': dp, 'ms': msf}})
state = DA(state, data={**DA.table(), **{'dp': dp}})
state = QF(state, data={**QF.table(), **{'dp': dp}})
return state
# Set deviation parameters
msf = torch.tensor(0.0, dtype=torch.float64)
msd = torch.tensor(0.0, dtype=torch.float64)
ms = torch.stack([msf, msd])
dp = torch.tensor([0.0], dtype=torch.float64)
# Set fixed point
fp = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
# Compute parametrix fixed point (first order in momentum deviation)
# Note, all parameters must be vectors
pfp, *_ = parametric_fixed_point((1, ), fp, [dp], fodo, ms)
# Define transformation around fixed point
def pfp_fodo(state, dp, ms):
return fodo(state + evaluate(pfp, [dp]), dp, ms) - evaluate(pfp, [dp])
# Tune
def tune(dp, ms):
matrix = torch.func.jacrev(pfp_fodo)(fp, dp, ms)
tune, *_ = twiss(matrix)
return tune
# Chromaticity
def chromaticity(ms):
return torch.func.jacrev(tune)(dp, ms)
# Compute tunes
tunes = tune(dp, ms)
print(tunes)
# Compute chromaticity
chromaticities = chromaticity(ms)
print(chromaticities.squeeze())
# Compute derivative of chromaticities
# The result is zero, since there is no dispersion to feed sextupoles down
print(torch.func.jacrev(chromaticity)(ms).squeeze())
tensor([0.2107, 0.1703], dtype=torch.float64)
tensor([-0.2279, -0.2107], dtype=torch.float64)
tensor([[0., 0.],
[0., 0.]], dtype=torch.float64)
Example-08: Octupole (element)
[1]:
# Comparison of octupole element with MADX-PTC and other features
[2]:
from pathlib import Path
from os import system
import torch
from model.library.octupole import Octupole
[3]:
# Tracking (paraxial)
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
exact = False
align = False
mo = + 50.0
dp = 0.005
length = 0.2
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
qx, px, qy, py = state.tolist()
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.05, dtype=torch.float64)
wx = align*torch.tensor(0.005, dtype=torch.float64)
wy = align*torch.tensor(-0.005, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
code = f"""
mag: octupole, l={length},k3={mo};
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag" ;
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()} ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact={str(exact).lower()} ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=5,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}} ;
ptc_track_end ;
ptc_end ;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
O = Octupole('O', length=length, mo=mo, dp=dp, exact=exact, order=5, ns=10)
res = O(state, alignment=align, data={**O.table(), **error})
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.009004942132987458, -0.005000291994759593, -0.004801204788639501, 0.0009979801079392878]
[0.009004942132987486, -0.005000291994759635, -0.004801204788639504, 0.0009979801079392843]
[-2.7755575615628914e-17, 4.2500725161431774e-17, 3.469446951953614e-18, 3.469446951953614e-18]
[4]:
# Tracking (exact)
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
exact = True
align = False
mo = + 50.0
dp = 0.005
length = 0.2
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
qx, px, qy, py = state.tolist()
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.05, dtype=torch.float64)
wx = align*torch.tensor(0.005, dtype=torch.float64)
wy = align*torch.tensor(-0.005, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
code = f"""
mag: octupole, l={length},k3={mo};
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag" ;
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()} ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact={str(exact).lower()} ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=5,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}} ;
ptc_track_end ;
ptc_end ;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
O = Octupole('O', length=length, mo=mo, dp=dp, exact=exact, order=5, ns=10)
res = O(state, alignment=align, data={**O.table(), **error})
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.00900492932570409, -0.005000291993307186, -0.004801202229721349, 0.0009979801112567327]
[0.009004929325704207, -0.0050002919933071705, -0.004801202229721335, 0.00099798011125672]
[-1.1622647289044608e-16, -1.5612511283791264e-17, -1.3877787807814457e-17, 1.2576745200831851e-17]
[5]:
# Tracking (exact, alignment)
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
exact = True
align = True
mo = + 50.0
dp = 0.005
length = 0.2
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
qx, px, qy, py = state.tolist()
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.05, dtype=torch.float64)
wx = align*torch.tensor(0.005, dtype=torch.float64)
wy = align*torch.tensor(-0.005, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
code = f"""
mag: octupole, l={length},k3={mo};
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag" ;
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()} ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact={str(exact).lower()} ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=5,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}} ;
ptc_track_end ;
ptc_end ;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
O = Octupole('O', length=length, mo=mo, dp=dp, exact=exact, order=5, ns=10)
res = O(state, alignment=align, data={**O.table(), **error})
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.009005660276793346, -0.004983923494470567, -0.004794436076349048, 0.0011299481578555504]
[0.009005660276792638, -0.004983923494470562, -0.004794436076348805, 0.0011299481578555233]
[7.077671781985373e-16, -5.204170427930421e-18, -2.42861286636753e-16, 2.710505431213761e-17]
[6]:
# Deviation/error variables
mo = 50.0
dp = 0.005
length = 0.2
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.05, dtype=torch.float64)
wx = align*torch.tensor(0.005, dtype=torch.float64)
wy = align*torch.tensor(-0.005, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
O = Octupole('O', length, mo, dp)
# Each element has two variant of a call method
# In the first case only state is passed, it is transformed using parameters specified on initializaton
print(O(state))
print()
# Deviation errors can be also passed to call method
# These variables are added to corresponding parameters specified on initializaton
# For example, element lenght can changed
print(O(state, data={**O.table(), **{'dl': -O.length}}))
print()
# In the above O.table() creates default deviation dictionary (with zero values for each deviaton)
# {**O.table(), **{'dl': -O.length}} replaces the 'dl' key value
# Additionaly, alignment errors are passed as deivation variables
# They are used if alignment flag is raised
print(O(state, data={**O.table(), **error}, alignment=True))
print()
# The following elements can be made equivalent using deviation variables
OA = Octupole('OA', length, mo, dp)
OB = Octupole('OB', length - 0.1, mo, dp)
print(OA(state) - OB(state, data={**OB.table(), **{'dl': torch.tensor(+0.1, dtype=OB.dtype)}}))
# Note, while in some cases float values can be passed as values to deviation variables
# The correct behaviour in guaranteed only for tensors
tensor([ 0.0090, -0.0050, -0.0048, 0.0010], dtype=torch.float64)
tensor([ 0.0100, -0.0050, -0.0050, 0.0010], dtype=torch.float64)
tensor([ 0.0090, -0.0050, -0.0048, 0.0011], dtype=torch.float64)
tensor([0., 0., 0., 0.], dtype=torch.float64)
[7]:
# Insertion element
# In this mode elements are treated as thin insertions (at the center)
# Using parameters specified on initialization, transport two matrices are computed
# These matrices are used to insert the element
# Input state is transformed from the element center to its entrance
# Next, transformation from the entrance frame to the exit frame is performed
# This transformation can contain errors
# The final step is to transform state from the exit frame back to the element center
# Without errors, this results in identity transformation for linear elements
mo = 50.0
dp = 0.005
length = 0.2
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
O = Octupole('O', length, mo, dp, exact=False, insertion=True)
# Since octupole is a nonlinear element, insertion is an identity transformation only for zero strenght
print(O(state) - state)
print(O(state, data={**O.table(), **{'mo': -mo}}) - state)
# Represents effect of an error (any nonzero value of strengh or a change in other parameter)
print(O(state, data={**O.table(), **{'dl': 0.1}}) - state)
# Exact tracking corresponds to inclusion of kinematic term as errors
O = Octupole('O', length, mo, dp, exact=True, insertion=True, ns=100, order=1)
print(O(state) - state)
tensor([ 0.0000e+00, -4.1667e-07, 0.0000e+00, -2.2917e-06],
dtype=torch.float64)
tensor([0., 0., 0., 0.], dtype=torch.float64)
tensor([-4.9754e-04, -5.2588e-07, 9.9342e-05, -3.2270e-06],
dtype=torch.float64)
tensor([-1.7351e-08, -4.1976e-07, -6.9314e-09, -2.2953e-06],
dtype=torch.float64)
[8]:
# Mapping over a set of initial conditions
# Call method can be used to map over a set of initial conditions
# Note, device can be set to cpu or gpu via base element classvariables
mo = 50.0
dp = 0.005
length = 0.2
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
O = Octupole('O', length, mo, dp, exact=True)
state = 1.0E-3*torch.randn((512, 4), dtype=O.dtype, device=O.device)
print(torch.vmap(O)(state).shape)
# To map over deviations parameters a wrapper function (or a lambda expression) can be used
def wrapper(state, dp):
return O(state, data={**O.table(), **{'dp': dp}})
dp = 1.0E-3*torch.randn(512, dtype=O.dtype, device=O.device)
print(torch.vmap(wrapper)(state, dp).shape)
torch.Size([512, 4])
torch.Size([512, 4])
[9]:
# Differentiability
# Both call methods are differentiable
# Derivative with respect to state can be computed directly
# For deviation variables, wrapping is required
mo = 50.0
dp = 0.005
length = 0.2
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
O = Octupole('O', length, mo, dp, exact=False)
# Compute derivative with respect to state
print(torch.func.jacrev(O)(state))
print()
# Compute derivative with respect to a deviation variable
mo = torch.tensor(0.0, dtype=torch.float64)
def wrapper(state, mo):
return O(state, data={**O.table(), **{'mo': mo}})
print(torch.func.jacrev(wrapper, 1)(state, mo))
print()
tensor([[ 9.9997e-01, 1.9900e-01, -4.6335e-05, -4.6105e-06],
[-3.3141e-04, 9.9997e-01, -4.6567e-04, -4.6335e-05],
[-4.6335e-05, -4.6105e-06, 1.0000e+00, 1.9901e-01],
[-4.6567e-04, -4.6335e-05, 3.3141e-04, 1.0000e+00]],
dtype=torch.float64)
tensor([-5.7528e-10, -5.7815e-09, -4.0127e-09, -4.0327e-08],
dtype=torch.float64)
[10]:
# Output at each step
# It is possible to collect output of state or tangent matrix at each integration step
# Number of integratin steps is controlled by ns parameter on initialization
# Alternatively, desired integration step length can be passed
# Number of integration steps is computed as ceil(length/ds)
mo = 50.0
dp = 0.005
length = 0.2
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
O = Octupole('O', length, mo, dp, exact=False, ns=10, output=True, matrix=True)
# Final state is still returned
print(O(state))
# Data is added to special attributes (state and tangent matrix)
print(O.container_output.shape)
print(O.container_matrix.shape)
# Number of integration steps can be changed
O.ns = 100
O(state)
print(O.container_output.shape)
print(O.container_matrix.shape)
tensor([ 0.0090, -0.0050, -0.0048, 0.0010], dtype=torch.float64)
torch.Size([10, 4])
torch.Size([10, 4, 4])
torch.Size([100, 4])
torch.Size([100, 4, 4])
[11]:
# Integration order is set on initialization (default value is zero)
# This order is related to difference order as 2n + 2
# Thus, zero corresponds to second order difference method
mo = 50.0
dp = 0.005
length = 0.2
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
O = Octupole('O', length, mo, dp, order=0, exact=True)
# For octupole integration is always performed
# In exact case, kinematic term error is added
O.ns = 10
ref = O(state)
O.ns = 100
res = O(state)
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
print()
# Integrator parameters are stored in data attribute (if integration is actually performed)
maps, weights = O._data
print(maps)
print(weights)
[0.00900492936806216, -0.005000291964120008, -0.004801202138358545, 0.0009979801465156844]
[0.00900492932612774, -0.005000291993015304, -0.004801202228807697, 0.0009979801116093128]
[4.193442121325219e-11, 2.889529587823958e-11, 9.044915164069245e-11, 3.4906371629978006e-11]
[0, 1, 2, 1, 0]
[0.5, 0.5, 1.0, 0.5, 0.5]
Example-09: Multipole (element)
[1]:
# Comparison of sextupole element with MADX-PTC and other features
[2]:
from pathlib import Path
from os import system
import torch
from model.library.multipole import Multipole
[3]:
# Tracking (paraxial)
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
exact = False
align = False
kn = - 2.0
ks = + 1.5
ms = 25.0
mo = 110.0
dp = 0.005
length = 0.5
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
qx, px, qy, py = state.tolist()
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.05, dtype=torch.float64)
wx = align*torch.tensor(0.005, dtype=torch.float64)
wy = align*torch.tensor(-0.005, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
code = f"""
mag:quadrupole,l={length},knl={{0.0,{kn*length},{ms*length},{mo*length}}},ksl={{0.0,{ks*length}}};
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag" ;
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()} ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact={str(exact).lower()} ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=5,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}} ;
ptc_track_end ;
ptc_end ;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
M = Multipole('M', length=length, kn=kn, ks=ks, ms=ms, mo=mo, dp=dp, exact=exact, order=5, ns=10)
res = M(state, alignment=align, data={**M.table(), **error})
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.00892946929535585, 0.0009165531774213284, -0.0017930189940976037, 0.01128986832436645]
[0.008929469295357165, 0.0009165531774215092, -0.001793018994097765, 0.011289868324367684]
[-1.3149203947904198e-15, -1.8084492237058214e-16, 1.6132928326584306e-16, -1.2333883914195098e-15]
[4]:
# Tracking (exact)
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
exact = True
align = False
kn = - 2.0
ks = + 1.5
ms = 25.0
mo = 110.0
dp = 0.005
length = 0.5
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
qx, px, qy, py = state.tolist()
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.05, dtype=torch.float64)
wx = align*torch.tensor(0.005, dtype=torch.float64)
wy = align*torch.tensor(-0.005, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
code = f"""
mag:quadrupole,l={length},knl={{0.0,{kn*length},{ms*length},{mo*length}}},ksl={{0.0,{ks*length}}};
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag" ;
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()} ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact={str(exact).lower()} ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=5,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}} ;
ptc_track_end ;
ptc_end ;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
M = Multipole('M', length=length, kn=kn, ks=ks, ms=ms, mo=mo, dp=dp, exact=exact, order=5, ns=10)
res = M(state, alignment=align, data={**M.table(), **error})
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.00892945162589142, 0.0009165626425029898, -0.0017929090323601758, 0.011289834389170184]
[0.008929451625892749, 0.0009165626425031966, -0.0017929090323603035, 0.011289834389171444]
[-1.3287981825982342e-15, -2.067573542929857e-16, 1.2771901591879242e-16, -1.259409243559162e-15]
[5]:
# Tracking (exact, alignment)
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
exact = True
align = True
kn = - 2.0
ks = + 1.5
ms = 25.0
mo = 110.0
dp = 0.005
length = 0.5
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
qx, px, qy, py = state.tolist()
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.05, dtype=torch.float64)
wx = align*torch.tensor(0.005, dtype=torch.float64)
wy = align*torch.tensor(-0.005, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
code = f"""
mag:quadrupole,l={length},knl={{0.0,{kn*length},{ms*length},{mo*length}}},ksl={{0.0,{ks*length}}};
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag" ;
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()} ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact={str(exact).lower()} ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=5,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}} ;
ptc_track_end ;
ptc_end ;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
M = Multipole('M', length=length, kn=kn, ks=ks, ms=ms, mo=mo, dp=dp, exact=exact, order=5, ns=10)
res = M(state, alignment=align, data={**M.table(), **error})
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.001664975746516068, -0.04016261215593401, -0.015906155451718536, -0.05363979979736713]
[0.001664975746510186, -0.040162612155939637, -0.015906155451718453, -0.053639799797374155]
[5.882013626168359e-15, 5.627442956068762e-15, -8.326672684688674e-17, 7.022160630754115e-15]
[6]:
# Deviation/error variables
kn = - 2.0
ks = + 1.5
ms = 25.0
mo = 110.0
mo = 50.0
dp = 0.005
length = 0.2
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
M = Multipole('M', length, kn, ks, ms, mo, dp)
# Each element has two variant of a call method
# In the first case only state is passed, it is transformed using parameters specified on initializaton
print(M(state))
print()
# Deviation errors can be also passed to call method
# These variables are added to corresponding parameters specified on initializaton
# For example, element lenght can changed
print(M(state, data={**M.table(), **{'dl': -M.length}}))
print()
# In the above M.table() creates default deviation dictionary (with zero values for each deviaton)
# {**M.table(), **{'dl': -M.length}} replaces the 'dl' key value
# Additionaly, alignment errors are passed as deivation variables
# They are used if alignment flag is raised
print(M(state, data={**M.table(), **error}, alignment=True))
print()
# The following elements can be made equivalent using deviation variables
MA = Multipole('MA', length, kn, ks, ms, mo, dp)
MB = Multipole('MB', length - 0.1, kn, ks, ms, mo, dp)
print(MA(state) - MB(state, data={**MB.table(), **{'dl': torch.tensor(+0.1, dtype=MB.dtype)}}))
# Note, while in some cases float values can be passed as values to deviation variables
# The correct behaviour in guaranteed only for tensors
tensor([ 0.0092, -0.0028, -0.0043, 0.0055], dtype=torch.float64)
tensor([ 0.0100, -0.0050, -0.0050, 0.0010], dtype=torch.float64)
tensor([ 0.0085, -0.0159, -0.0060, -0.0224], dtype=torch.float64)
tensor([0., 0., 0., 0.], dtype=torch.float64)
[7]:
# Insertion element
# In this mode elements are treated as thin insertions (at the center)
# Using parameters specified on initialization, transport two matrices are computed
# These matrices are used to insert the element
# Input state is transformed from the element center to its entrance
# Next, transformation from the entrance frame to the exit frame is performed
# This transformation can contain errors
# The final step is to transform state from the exit frame back to the element center
# Without errors, this results in identity transformation for linear elements
kn = - 2.0
ks = + 1.5
ms = 25.0
mo = 110.0
mo = 50.0
dp = 0.005
length = 0.2
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
M = Multipole('M', length, kn, ks, ms, mo, dp, exact=False, insertion=True)
# Since multipole is a nonlinear element (non-zero sextupole or octupole)
# Insertion is an identity transformation only for zero strenght
print(M(state) - state)
print(M(state, data={**M.table(), **{'ms': -ms, 'mo': -mo}}) - state)
# Represents effect of an error (any nonzero value of strengh or a change in other parameter)
print(M(state, data={**M.table(), **{'dl': 0.1}}) - state)
# Exact tracking corresponds to inclusion of kinematic term as errors
M = Multipole('M', length, kn, ks, ms, mo, dp, exact=True, insertion=True, ns=20, order=1)
print(M(state) - state)
tensor([ 6.9389e-18, -1.8792e-04, -8.6736e-19, -2.5229e-04],
dtype=torch.float64)
tensor([ 6.9389e-18, -1.7347e-18, -8.6736e-19, -4.3368e-19],
dtype=torch.float64)
tensor([-0.0004, 0.0009, 0.0002, 0.0021], dtype=torch.float64)
tensor([-7.9785e-07, -1.9093e-04, -5.6642e-07, -2.5071e-04],
dtype=torch.float64)
[8]:
# Mapping over a set of initial conditions
# Call method can be used to map over a set of initial conditions
# Note, device can be set to cpu or gpu via base element classvariables
kn = - 2.0
ks = + 1.5
ms = 25.0
mo = 110.0
mo = 50.0
dp = 0.005
length = 0.2
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
M = Multipole('M', length, kn, ks, ms, mo, dp, exact=True)
state = 1.0E-3*torch.randn((512, 4), dtype=M.dtype, device=M.device)
print(torch.vmap(M)(state).shape)
# To map over deviations parameters a wrapper function (or a lambda expression) can be used
def wrapper(state, dp):
return M(state, data={**M.table(), **{'dp': dp}})
dp = 1.0E-3*torch.randn(512, dtype=M.dtype, device=M.device)
print(torch.vmap(wrapper)(state, dp).shape)
torch.Size([512, 4])
torch.Size([512, 4])
[9]:
# Differentiability
# Both call methods are differentiable
# Derivative with respect to state can be computed directly
# For deviation variables, wrapping is required
kn = - 2.0
ks = + 1.5
ms = 25.0
mo = 110.0
mo = 50.0
dp = 0.005
length = 0.2
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
M = Multipole('M', length, kn, ks, ms, mo, dp, exact=False)
# Compute derivative with respect to state
print(torch.func.jacrev(M)(state))
print()
# Compute derivative with respect to a deviation variable
kn = torch.tensor(0.0, dtype=torch.float64)
def wrapper(state, kn):
return M(state, data={**M.table(), **{'kn': kn}})
print(torch.func.jacrev(wrapper, 1)(state, kn))
print()
tensor([[ 1.0353, 0.2012, 0.0274, 0.0017],
[ 0.3588, 1.0353, 0.2757, 0.0274],
[ 0.0274, 0.0017, 0.9653, 0.1969],
[ 0.2757, 0.0274, -0.3449, 0.9653]], dtype=torch.float64)
tensor([-1.9468e-04, -1.9487e-03, -9.6920e-05, -9.5528e-04],
dtype=torch.float64)
[10]:
# Output at each step
# It is possible to collect output of state or tangent matrix at each integration step
# Number of integratin steps is controlled by ns parameter on initialization
# Alternatively, desired integration step length can be passed
# Number of integration steps is computed as ceil(length/ds)
kn = - 2.0
ks = + 1.5
ms = 25.0
mo = 110.0
mo = 50.0
dp = 0.005
length = 0.2
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
M = Multipole('M', length, kn, ks, ms, mo, dp, exact=False, ns=10, output=True, matrix=True)
# Final state is still returned
print(M(state))
# Data is added to special attributes (state and tangent matrix)
print(M.container_output.shape)
print(M.container_matrix.shape)
# Number of integration steps can be changed
M.ns = 100
M(state)
print(M.container_output.shape)
print(M.container_matrix.shape)
tensor([ 0.0092, -0.0028, -0.0043, 0.0055], dtype=torch.float64)
torch.Size([10, 4])
torch.Size([10, 4, 4])
torch.Size([100, 4])
torch.Size([100, 4, 4])
[11]:
# Integration order is set on initialization (default value is zero)
# This order is related to difference order as 2n + 2
# Thus, zero corresponds to second order difference method
kn = - 2.0
ks = + 1.5
ms = 25.0
mo = 110.0
mo = 50.0
dp = 0.005
length = 0.2
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
M = Multipole('M', length, kn, ks, ms, mo, dp, order=0, exact=True)
# For multipole with non-zero sextupole and/or octupole integration is always performed
# In exact case, kinematic term error is added
M.ns = 10
ref = M(state)
M.ns = 100
res = M(state)
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
print()
# Integrator parameters are stored in data attribute (if integration is actually performed)
maps, weights = M._data
print(maps)
print(weights)
[0.009228705737231328, -0.0027662827194168435, -0.0043416399485996455, 0.0055422008499342295]
[0.009228699312521689, -0.0027663108074714327, -0.0043416467924913375, 0.0055422142138782556]
[6.424709639296644e-09, 2.808805458923494e-08, 6.843891692080717e-09, -1.336394402605412e-08]
[0, 1, 2, 1, 0]
[0.5, 0.5, 1.0, 0.5, 0.5]
Example-10: Dipole (element)
[1]:
# Comparison of dipole element with MADX-PTC and other features
# Note, cylindrical multipole is included upto octupole order
# Potential is not truncated in paraxial case, only sqrt is expanded
# In exact case effects of multipoles are not accounted in wedges (cases with e1 or e2 not equal to zero)
[2]:
from pathlib import Path
from os import system
import torch
from model.library.drift import Drift
from model.library.quadrupole import Quadrupole
from model.library.sextupole import Sextupole
from model.library.dipole import Dipole
[3]:
# Tracking (paraxial)
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
exact = False
align = False
length = 2.0
angle = 0.05
e1 = 0.0
e2 = 0.0
kn = 0.0
ks = 0.0
ms = 0.0
mo = 0.0
dp = 0.001
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
qx, px, qy, py = state.tolist()
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.05, dtype=torch.float64)
wx = align*torch.tensor(0.005, dtype=torch.float64)
wy = align*torch.tensor(-0.005, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
code = f"""
mag:sbend,l={length},angle={angle},e1={e1},e2={e2},knl={{0.0,{kn*length},{ms*length},{mo*length}}},ksl={{0.0,{ks*length}}},kill_ent_fringe=false,kill_exi_fringe=false;
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag" ;
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()} ;
ptc_create_universe,sector_nmul_max=5,sector_nmul=5 ;
ptc_create_layout,model=1,method=6,nst=1000,exact={str(exact).lower()} ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=5,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}} ;
ptc_track_end ;
ptc_end ;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
D = Dipole('D', length=length, angle=angle, e1=e1, e2=e2, kn=kn, ks=ks, ms=ms, mo=mo, dp=dp, exact=exact, order=2, ns=25)
res = D(state, alignment=align, data={**D.table(), **error})
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[5.160257777686003e-05, -0.004956273150572646, -0.0030019980019983517, 0.001]
[5.1602577776445975e-05, -0.004956273150572915, -0.0030019980019981656, 0.0010000000000000434]
[4.1405680967221414e-16, 2.688821387764051e-16, -1.8604909279851256e-16, -4.336808689942018e-17]
[4]:
# Tracking (paraxial, e1 & e2)
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
exact = False
align = False
length = 2.0
angle = 0.05
e1 = 0.025
e2 = 0.025
kn = 0.0
ks = 0.0
ms = 0.0
mo = 0.0
dp = 0.001
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
qx, px, qy, py = state.tolist()
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.05, dtype=torch.float64)
wx = align*torch.tensor(0.005, dtype=torch.float64)
wy = align*torch.tensor(-0.005, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
code = f"""
mag:sbend,l={length},angle={angle},e1={e1},e2={e2},knl={{0.0,{kn*length},{ms*length},{mo*length}}},ksl={{0.0,{ks*length}}},kill_ent_fringe=false,kill_exi_fringe=false;
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag" ;
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()} ;
ptc_create_universe,sector_nmul_max=5,sector_nmul=5 ;
ptc_create_layout,model=1,method=6,nst=1000,exact={str(exact).lower()} ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=5,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}} ;
ptc_track_end ;
ptc_end ;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
D = Dipole('D', length=length, angle=angle, e1=e1, e2=e2, kn=kn, ks=ks, ms=ms, mo=mo, dp=dp, exact=exact, order=2, ns=25)
res = D(state, alignment=align, data={**D.table(), **error})
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[6.408749411377232e-05, -0.00494998958983017, -0.002995752944647053, 0.0010049983869644134]
[6.408749411335537e-05, -0.004949989589830473, -0.0029957529446465857, 0.0010049983869644566]
[4.169434979564568e-16, 3.0270924655795284e-16, -4.670742959067553e-16, -4.3151246464923076e-17]
[5]:
# Tracking (paraxial, e1 & e2, alignment)
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
exact = False
align = True
length = 2.0
angle = 0.05
e1 = 0.025
e2 = 0.025
kn = 0.0
ks = 0.0
ms = 0.0
mo = 0.0
dp = 0.001
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
qx, px, qy, py = state.tolist()
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.05, dtype=torch.float64)
wx = align*torch.tensor(0.005, dtype=torch.float64)
wy = align*torch.tensor(-0.005, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
code = f"""
mag:sbend,l={length},angle={angle},e1={e1},e2={e2},knl={{0.0,{kn*length},{ms*length},{mo*length}}},ksl={{0.0,{ks*length}}},kill_ent_fringe=false,kill_exi_fringe=false;
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag" ;
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()} ;
ptc_create_universe,sector_nmul_max=5,sector_nmul=5 ;
ptc_create_layout,model=1,method=6,nst=1000,exact={str(exact).lower()} ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=5,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}} ;
ptc_track_end ;
ptc_end ;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
D = Dipole('D', length=length, angle=angle, e1=e1, e2=e2, kn=kn, ks=ks, ms=ms, mo=mo, dp=dp, exact=exact, order=2, ns=25)
res = D(state, alignment=align, data={**D.table(), **error})
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.0027250502286323983, -0.004697460778410744, -0.007781317874336121, -0.004015687563474919]
[0.0027250502286311207, -0.004697460778410097, -0.007781317874338802, -0.004015687563476177]
[1.2776238400569184e-15, -6.47051856539349e-16, 2.6810151321221554e-15, 1.2576745200831851e-15]
[6]:
# Tracking (paraxial, kn & ks)
# Note, in paraxial case, MADX seems to truncate cylindrical potential
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
exact = False
align = False
length = 2.0
angle = 0.05
e1 = 0.0
e2 = 0.0
kn = 0.1
ks = 0.1
ms = 0.0
mo = 0.0
dp = 0.001
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
qx, px, qy, py = state.tolist()
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.05, dtype=torch.float64)
wx = align*torch.tensor(0.005, dtype=torch.float64)
wy = align*torch.tensor(-0.005, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
code = f"""
mag:sbend,l={length},angle={angle},e1={e1},e2={e2},knl={{0.0,{kn*length},{ms*length},{mo*length}}},ksl={{0.0,{ks*length}}},kill_ent_fringe=false,kill_exi_fringe=false;
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag" ;
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()} ;
ptc_create_universe,sector_nmul_max=5,sector_nmul=5 ;
ptc_create_layout,model=1,method=6,nst=1000,exact={str(exact).lower()} ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=5,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}} ;
ptc_track_end ;
ptc_end ;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
D = Dipole('D', length=length, angle=angle, e1=e1, e2=e2, kn=kn, ks=ks, ms=ms, mo=mo, dp=dp, exact=exact, order=2, ns=25)
res = D(state, alignment=align, data={**D.table(), **error})
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[-0.002043638956596164, -0.006566087436123452, -0.00259447159458907, 0.0010855376916213359]
[-0.0020440852924812135, -0.006566346702412346, -0.002594440402484201, 0.001085525276668085]
[4.46335885049675e-07, 2.592662888935629e-07, -3.119210486906762e-08, 1.2414953250768773e-08]
[7]:
# Tracking (paraxial, kn & ks, alignment)
# Note, in paraxial case, MADX seems to truncate cylindrical potential
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
exact = False
align = True
length = 2.0
angle = 0.05
e1 = 0.0
e2 = 0.0
kn = 0.1
ks = 0.1
ms = 0.0
mo = 0.0
dp = 0.001
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
qx, px, qy, py = state.tolist()
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.05, dtype=torch.float64)
wx = align*torch.tensor(0.005, dtype=torch.float64)
wy = align*torch.tensor(-0.005, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
code = f"""
mag:sbend,l={length},angle={angle},e1={e1},e2={e2},knl={{0.0,{kn*length},{ms*length},{mo*length}}},ksl={{0.0,{ks*length}}},kill_ent_fringe=false,kill_exi_fringe=false;
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag" ;
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()} ;
ptc_create_universe,sector_nmul_max=5,sector_nmul=5 ;
ptc_create_layout,model=1,method=6,nst=1000,exact={str(exact).lower()} ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=5,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}} ;
ptc_track_end ;
ptc_end ;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
D = Dipole('D', length=length, angle=angle, e1=e1, e2=e2, kn=kn, ks=ks, ms=ms, mo=mo, dp=dp, exact=exact, order=2, ns=25)
res = D(state, alignment=align, data={**D.table(), **error})
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.013167193439103305, 0.005511119368028012, -0.010781508233295324, -0.007329921037793256]
[0.013155910631910853, 0.0055012372192967465, -0.010779780613239438, -0.00732819304969001]
[1.128280719245138e-05, 9.882148731265271e-06, -1.727620055886822e-06, -1.7279881032459046e-06]
[8]:
# Tracking (paraxial, kn & ks, ms & mo, alignment)
# Note, in paraxial case, MADX seems to truncate cylindrical potential
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
exact = False
align = True
length = 2.0
angle = 0.05
e1 = 0.0
e2 = 0.0
kn = 0.1
ks = 0.1
ms = 0.1
mo = 0.1
dp = 0.001
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
qx, px, qy, py = state.tolist()
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.05, dtype=torch.float64)
wx = align*torch.tensor(0.005, dtype=torch.float64)
wy = align*torch.tensor(-0.005, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
code = f"""
mag:sbend,l={length},angle={angle},e1={e1},e2={e2},knl={{0.0,{kn*length},{ms*length},{mo*length}}},ksl={{0.0,{ks*length}}},kill_ent_fringe=false,kill_exi_fringe=false;
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag" ;
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()} ;
ptc_create_universe,sector_nmul_max=5,sector_nmul=5 ;
ptc_create_layout,model=1,method=6,nst=1000,exact={str(exact).lower()} ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=5,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}} ;
ptc_track_end ;
ptc_end ;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
D = Dipole('D', length=length, angle=angle, e1=e1, e2=e2, kn=kn, ks=ks, ms=ms, mo=mo, dp=dp, exact=exact, order=2, ns=25)
res = D(state, alignment=align, data={**D.table(), **error})
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.013072849472264409, 0.005416718324594963, -0.010908836090706359, -0.007452351251381879]
[0.013061618858281962, 0.0054068762860350235, -0.010906993838412838, -0.007450515116390934]
[1.1230613982447443e-05, 9.842038559939453e-06, -1.842252293521307e-06, -1.8361349909453567e-06]
[9]:
# Tracking (paraxial, e1 & e2, kn & ks, ms & mo, alignment)
# Note, in paraxial case, MADX seems to truncate cylindrical potential
# Note, model dipole doesn't account for multipoles in wedges
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
exact = False
align = True
length = 2.0
angle = 0.05
e1 = 0.025
e2 = 0.025
kn = 0.1
ks = 0.1
ms = 0.1
mo = 0.1
dp = 0.001
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
qx, px, qy, py = state.tolist()
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.05, dtype=torch.float64)
wx = align*torch.tensor(0.005, dtype=torch.float64)
wy = align*torch.tensor(-0.005, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
code = f"""
mag:sbend,l={length},angle={angle},e1={e1},e2={e2},knl={{0.0,{kn*length},{ms*length},{mo*length}}},ksl={{0.0,{ks*length}}},kill_ent_fringe=false,kill_exi_fringe=false;
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag" ;
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()} ;
ptc_create_universe,sector_nmul_max=5,sector_nmul=5 ;
ptc_create_layout,model=1,method=6,nst=1000,exact={str(exact).lower()} ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=5,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}} ;
ptc_track_end ;
ptc_end ;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
D = Dipole('D', length=length, angle=angle, e1=e1, e2=e2, kn=kn, ks=ks, ms=ms, mo=mo, dp=dp, exact=exact, order=2, ns=25)
res = D(state, alignment=align, data={**D.table(), **error})
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.013030972087034147, 0.005379072261796265, -0.010940636831296861, -0.007479587493733525]
[0.013019736470996354, 0.005369216085022485, -0.0109387887264908, -0.007477745021700929]
[1.1235616037793758e-05, 9.85617677377957e-06, -1.8481048060618732e-06, -1.8424720325954658e-06]
[10]:
# Tracking (exact, alignment)
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
exact = True
align = True
length = 2.0
angle = 0.05
e1 = 0.0
e2 = 0.0
kn = 0.0
ks = 0.0
ms = 0.0
mo = 0.0
dp = 0.001
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
qx, px, qy, py = state.tolist()
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.05, dtype=torch.float64)
wx = align*torch.tensor(0.005, dtype=torch.float64)
wy = align*torch.tensor(-0.005, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
code = f"""
mag:sbend,l={length},angle={angle},e1={e1},e2={e2},knl={{0.0,{kn*length},{ms*length},{mo*length}}},ksl={{0.0,{ks*length}}},kill_ent_fringe=false,kill_exi_fringe=false;
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag" ;
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()} ;
ptc_create_universe,sector_nmul_max=5,sector_nmul=5 ;
ptc_create_layout,model=1,method=6,nst=1000,exact={str(exact).lower()} ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=5,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}} ;
ptc_track_end ;
ptc_end ;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
D = Dipole('D', length=length, angle=angle, e1=e1, e2=e2, kn=kn, ks=ks, ms=ms, mo=mo, dp=dp, exact=exact, order=2, ns=25)
res = D(state, alignment=align, data={**D.table(), **error})
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.002770798305588665, -0.004651371270674763, -0.007745680488823617, -0.0039921009984161026]
[0.0027707983054956944, -0.004651371270673946, -0.007745680488833436, -0.003992100998417344]
[9.2970769971501e-14, -8.161873954470877e-16, 9.819402235766717e-15, 1.2411946470614055e-15]
[11]:
# Tracking (exact, kn & ks, ms & mo, alignment)
# Note, in model dipole cylindrical potential is truncated at octupole
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
exact = True
align = True
length = 2.0
angle = 0.05
e1 = 0.0
e2 = 0.0
kn = 0.1
ks = 0.1
ms = 0.1
mo = 0.1
dp = 0.001
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
qx, px, qy, py = state.tolist()
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.05, dtype=torch.float64)
wx = align*torch.tensor(0.005, dtype=torch.float64)
wy = align*torch.tensor(-0.005, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
code = f"""
mag:sbend,l={length},angle={angle},e1={e1},e2={e2},knl={{0.0,{kn*length},{ms*length},{mo*length}}},ksl={{0.0,{ks*length}}},kill_ent_fringe=false,kill_exi_fringe=false;
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag" ;
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()} ;
ptc_create_universe,sector_nmul_max=5,sector_nmul=5 ;
ptc_create_layout,model=1,method=6,nst=1000,exact={str(exact).lower()} ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=5,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}} ;
ptc_track_end ;
ptc_end ;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
D = Dipole('D', length=length, angle=angle, e1=e1, e2=e2, kn=kn, ks=ks, ms=ms, mo=mo, dp=dp, exact=exact, order=2, ns=25)
res = D(state, alignment=align, data={**D.table(), **error})
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.013055723507830729, 0.005405610520344896, -0.01089583005089035, -0.007447552679263773]
[0.013055723646617522, 0.005405610850033292, -0.010895828250285611, -0.007447551055280752]
[-1.387867928220876e-10, -3.2968839637492753e-10, -1.8006047382279622e-09, -1.6239830209763273e-09]
[12]:
# Tracking (exact, e1 & e2, kn & ks, ms & mo, alignment)
# Note, in model dipole cylindrical potential is truncated at octupole
# Note, model dipole doesn't account for multipoles in wedges
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
exact = True
align = True
length = 2.0
angle = 0.05
e1 = 0.025
e2 = 0.025
kn = 0.1
ks = 0.1
ms = 0.1
mo = 0.1
dp = 0.001
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
qx, px, qy, py = state.tolist()
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.05, dtype=torch.float64)
wx = align*torch.tensor(0.005, dtype=torch.float64)
wy = align*torch.tensor(-0.005, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
code = f"""
mag:sbend,l={length},angle={angle},e1={e1},e2={e2},knl={{0.0,{kn*length},{ms*length},{mo*length}}},ksl={{0.0,{ks*length}}},kill_ent_fringe=false,kill_exi_fringe=false;
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag" ;
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()} ;
ptc_create_universe,sector_nmul_max=5,sector_nmul=5 ;
ptc_create_layout,model=1,method=6,nst=1000,exact={str(exact).lower()} ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=5,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}} ;
ptc_track_end ;
ptc_end ;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
D = Dipole('D', length=length, angle=angle, e1=e1, e2=e2, kn=kn, ks=ks, ms=ms, mo=mo, dp=dp, exact=exact, order=2, ns=25)
res = D(state, alignment=align, data={**D.table(), **error})
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.013018589129527029, 0.005372361621197678, -0.010919187705983761, -0.007468383469439608]
[0.013013881710648583, 0.0053679558070361885, -0.010927596957624465, -0.007474796553899775]
[4.707418878445446e-06, 4.4058141614898225e-06, 8.409251640703955e-06, 6.413084460166543e-06]
[13]:
# Deviation/error variables
length = 2.0
angle = 0.05
e1 = 0.025
e2 = 0.025
kn = 0.1
ks = 0.1
ms = 0.1
mo = 0.1
dp = 0.001
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
D = Dipole('D', length, angle, e1, e2, kn, ks, ms, mo, dp)
# Each element has two variant of a call method
# In the first case only state is passed, it is transformed using parameters specified on initializaton
print(D(state))
print()
# Deviation errors can be also passed to call method
# These variables are added to corresponding parameters specified on initializaton
# For example, element lenght can changed
print(D(state, data={**D.table(), **{'dl': -0.5*D.length}}))
print()
# In the above D.table() creates default deviation dictionary (with zero values for each deviaton)
# {**D.table(), **{'dl': -D.length}} replaces the 'dl' key value
# Additionaly, alignment errors are passed as deivation variables
# They are used if alignment flag is raised
print(D(state, data={**D.table(), **error}, alignment=True))
print()
# The following elements can be made equivalent using deviation variables
DA = Dipole('DA', length, angle, e1, e2, kn, ks, ms, mo, dp)
DB = Dipole('DB', length - 0.1, angle, e1, e2, kn, ks, ms, mo, dp)
print(DA(state) - DB(state, data={**DB.table(), **{'dl': torch.tensor(+0.1, dtype=DB.dtype)}}))
# Note, while in some cases float values can be passed as values to deviation variables
# The correct behaviour in guaranteed only for tensors
tensor([-0.0020, -0.0066, -0.0026, 0.0011], dtype=torch.float64)
tensor([ 0.0044, -0.0061, -0.0038, 0.0013], dtype=torch.float64)
tensor([ 0.0130, 0.0054, -0.0109, -0.0075], dtype=torch.float64)
tensor([0., 0., 0., 0.], dtype=torch.float64)
[14]:
# Insertion element
import torch
from model.library.dipole import Dipole
# In this mode elements are treated as thin insertions (at the center)
# Using parameters specified on initialization, transport two matrices are computed
# These matrices are used to insert the element
# Input state is transformed from the element center to its entrance
# Next, transformation from the entrance frame to the exit frame is performed
# This transformation can contain errors
# The final step is to transform state from the exit frame back to the element center
# Without errors, this results in identity transformation for linear elements
length = 2.0
angle = 0.05
e1 = 0.025
e2 = 0.025
kn = 0.0
ks = 0.0
ms = 0.0
mo = 0.0
dp = 0.0
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
D = Dipole('D', length, angle, e1, e2, kn, ks, ms, mo, dp, exact=False, insertion=True)
# For dipole insertion is an identity transformation in the following is true
# dp = 0 (chomatic orbit change)
# kn & ks and ms & mo are all equal to zero (nonlinearity of cylindrical potential)
print(D(state) - state)
# Represents effect of an error (any nonzero value of strengh or a change in other parameter)
print(D(state, data={**D.table(), **{'dp': 0.001}}) - state)
# Exact tracking corresponds to inclusion of kinematic term as errors
D = Dipole('D', length, angle, e1, e2, kn, ks, ms, mo, dp, exact=True, insertion=True)
print(D(state) - state)
tensor([ 1.0408e-17, -4.3368e-18, -4.3368e-18, 8.6736e-19],
dtype=torch.float64)
tensor([ 9.9380e-06, 4.9995e-05, -1.9980e-06, 6.5052e-19],
dtype=torch.float64)
tensor([-2.3859e-06, -5.8600e-06, -7.2738e-07, -2.4947e-07],
dtype=torch.float64)
[15]:
# Mapping over a set of initial conditions
# Call method can be used to map over a set of initial conditions
# Note, device can be set to cpu or gpu via base element classvariables
length = 2.0
angle = 0.05
e1 = 0.025
e2 = 0.025
kn = 0.5
ks = 0.5
ms = 1.0
mo = 1.0
dp = 0.001
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
D = Dipole('D', length, angle, e1, e2, kn, ks, ms, mo, dp)
state = 1.0E-3*torch.randn((512, 4), dtype=D.dtype, device=D.device)
print(torch.vmap(D)(state).shape)
# To map over deviations parameters a wrapper function (or a lambda expression) can be used
def wrapper(state, dp):
return D(state, data={**D.table(), **{'dp': dp}})
dp = 1.0E-3*torch.randn(512, dtype=D.dtype, device=D.device)
print(torch.vmap(wrapper)(state, dp).shape)
torch.Size([512, 4])
torch.Size([512, 4])
[16]:
# Differentiability
# Both call methods are differentiable
# Derivative with respect to state can be computed directly
# For deviation variables, wrapping is required
length = 2.0
angle = 0.05
e1 = 0.025
e2 = 0.025
kn = 0.5
ks = 0.5
ms = 1.0
mo = 1.0
dp = 0.001
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
D = Dipole('D', length, angle, e1, e2, kn, ks, ms, mo, dp)
# Compute derivative with respect to state
print(torch.func.jacrev(D)(state))
print()
# Compute derivative with respect to a deviation variable
e1 = torch.tensor(0.0, dtype=torch.float64)
def wrapper(state, e1):
return D(state, data={**D.table(), **{'e1': e1}})
print(torch.func.jacrev(wrapper, 1)(state, e1))
print()
tensor([[ 0.3083, 1.4545, 1.0125, 0.6652],
[-0.3993, 0.3083, 1.0602, 1.0168],
[ 1.0168, 0.6652, 2.3568, 2.8065],
[ 1.0602, 1.0125, 1.7383, 2.3568]], dtype=torch.float64)
tensor([0.0004, 0.0002, 0.0005, 0.0005], dtype=torch.float64)
[17]:
# Output at each step
# It is possible to collect output of state or tangent matrix at each integration step
# Number of integratin steps is controlled by ns parameter on initialization
# Alternatively, desired integration step length can be passed
# Number of integration steps is computed as ceil(length/ds)
length = 2.0
angle = 0.05
e1 = 0.025
e2 = 0.025
kn = 0.5
ks = 0.5
ms = 1.0
mo = 1.0
dp = 0.001
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
D = Dipole('D', length, angle, e1, e2, kn, ks, ms, mo, dp, exact=False, ns=10, output=True, matrix=True)
# Final state is still returned
print(D(state))
# Data is added to special attributes (state and tangent matrix)
print(D.container_output.shape)
print(D.container_matrix.shape)
# Number of integration steps can be changed
D.ns = 100
D(state)
print(D.container_output.shape)
print(D.container_matrix.shape)
tensor([-0.0086, -0.0098, -0.0022, -0.0008], dtype=torch.float64)
torch.Size([10, 4])
torch.Size([10, 4, 4])
torch.Size([100, 4])
torch.Size([100, 4, 4])
[18]:
# Integration order is set on initialization (default value is zero)
# This order is related to difference order as 2n + 2
# Thus, zero corresponds to second order difference method
length = 2.0
angle = 0.05
e1 = 0.025
e2 = 0.025
kn = 0.5
ks = 0.5
ms = 1.0
mo = 1.0
dp = 0.001
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
D = Dipole('D', length, angle, e1, e2, kn, ks, ms, mo, dp, exact=True, ns=10)
# For dipole integration is always performed
# In exact case, kinematic term error is added
D.ns = 10
ref = D(state)
D.ns = 100
res = D(state)
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
print()
# Integrator parameters are stored in data attribute (if integration is actually performed)
maps, weights = D._data
print(maps)
print(weights)
[-0.00858751580977462, -0.009819760091907982, -0.0021662845096666727, -0.0008078063877268448]
[-0.008587660168877631, -0.00982000432362944, -0.0021667806526843485, -0.0008081645802833406]
[1.443591030117486e-07, 2.442317214579326e-07, 4.961430176758305e-07, 3.5819255649581234e-07]
[0, 1, 2, 3, 4, 3, 2, 1, 0]
[0.5, 0.5, 0.5, 0.5, 1.0, 0.5, 0.5, 0.5, 0.5]
[19]:
# Derivatives of twiss parameters (chromaticity)
# pip install git+https://github.com/i-a-morozov/twiss.git@main
# pip install git+https://github.com/i-a-morozov/ndmap.git@main
from twiss import twiss
from ndmap.pfp import parametric_fixed_point
from ndmap.evaluate import evaluate
QF = Quadrupole('QF', 0.5, +0.21)
QD = Quadrupole('QD', 0.5, -0.19)
SF = Sextupole('SF', 0.25)
SD = Sextupole('SD', 0.25)
DR = Drift('DR', 0.25)
BM = Dipole('DR', 3.50, 0.15)
def fodo(state, dp, ms):
dp, *_ = dp
msf, msd, *_ = ms
state = QF(state, data={**QF.table(), **{'dp': dp}})
state = DR(state, data={**DR.table(), **{'dp': dp}})
state = SF(state, data={**SF.table(), **{'dp': dp, 'ms': msf}})
state = DR(state, data={**DR.table(), **{'dp': dp}})
state = BM(state, data={**BM.table(), **{'dp': dp}})
state = DR(state, data={**DR.table(), **{'dp': dp}})
state = SD(state, data={**SD.table(), **{'dp': dp, 'ms': msd}})
state = DR(state, data={**DR.table(), **{'dp': dp}})
state = QD(state, data={**QD.table(), **{'dp': dp}})
state = QD(state, data={**QD.table(), **{'dp': dp}})
state = DR(state, data={**DR.table(), **{'dp': dp}})
state = SD(state, data={**SD.table(), **{'dp': dp, 'ms': msd}})
state = DR(state, data={**DR.table(), **{'dp': dp}})
state = BM(state, data={**BM.table(), **{'dp': dp}})
state = DR(state, data={**DR.table(), **{'dp': dp}})
state = SF(state, data={**SF.table(), **{'dp': dp, 'ms': msf}})
state = DR(state, data={**DR.table(), **{'dp': dp}})
state = QF(state, data={**QF.table(), **{'dp': dp}})
return state
# Set deviation parameters
msf = torch.tensor(0.0, dtype=torch.float64)
msd = torch.tensor(0.0, dtype=torch.float64)
ms = torch.stack([msf, msd])
dp = torch.tensor([0.0], dtype=torch.float64)
# Set fixed point
fp = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
# Compute parametrix fixed point (first order in momentum deviation)
# Note, all parameters must be vectors
pfp, *_ = parametric_fixed_point((1, ), fp, [dp], fodo, ms)
# Define transformation around fixed point
def pfp_fodo(state, dp, ms):
return fodo(state + evaluate(pfp, [dp]), dp, ms) - evaluate(pfp, [dp])
# Tune
def tune(dp, ms):
matrix = torch.func.jacrev(pfp_fodo)(fp, dp, ms)
tune, *_ = twiss(matrix)
return tune
# Chromaticity
def chromaticity(ms):
return torch.func.jacrev(tune)(dp, ms)
# Compute tunes
tunes = tune(dp, ms)
print(tunes)
# Compute chromaticity
chromaticities = chromaticity(ms).squeeze()
print(chromaticities)
# Compute derivative of chromaticities
jacobian = torch.func.jacrev(chromaticity)(ms).squeeze()
print(jacobian)
# Correct chomaticity
print((chromaticity(ms - torch.linalg.pinv(jacobian) @ chromaticities)).squeeze())
tensor([0.2210, 0.1703], dtype=torch.float64)
tensor([-0.2310, -0.2107], dtype=torch.float64)
tensor([[ 1.6013, 0.3613],
[-0.7593, -1.2452]], dtype=torch.float64)
tensor([-1.1102e-16, 1.3878e-16], dtype=torch.float64)
Example-11: Corrector (element)
[1]:
# Comparison of corrector element with MADX-PTC and other features
[2]:
from pathlib import Path
from os import system
import torch
from model.library.corrector import Corrector
[3]:
# Tracking
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
exact = True
align = False
cx = +0.001
cy = -0.005
dp = 0.005
state = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
qx, px, qy, py = state.tolist()
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.05, dtype=torch.float64)
wx = align*torch.tensor(0.005, dtype=torch.float64)
wy = align*torch.tensor(-0.005, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
code = f"""
cx:hkicker,l=0.0,kick={cx};
cy:vkicker,l=0.0,kick={cy};
map:line=(cx, cy) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag" ;
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()} ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact={str(exact).lower()} ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=5,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}} ;
ptc_track_end ;
ptc_end ;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
C = Corrector('C', cx=cx, cy=cy, dp=dp)
res = C(state, alignment=align, data={**C.table(), **error})
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.0, 0.001, 0.0, -0.005]
[0.0, 0.001, 0.0, -0.005]
[0.0, 0.0, 0.0, 0.0]
[4]:
# Tracking (alignment)
# Only dx and dy alignment errors seems to work as expected in MADX
# Also, wz rotation can be assosiated with tilt
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
exact = True
align = True
cx = +0.001
cy = -0.005
dp = 0.005
state = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
qx, px, qy, py = state.tolist()
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.0, dtype=torch.float64)
wx = align*torch.tensor(0.0, dtype=torch.float64)
wy = align*torch.tensor(0.0, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
code = f"""
cx:hkicker,l=0.0,kick={cx},tilt={wz.item()};
cy:vkicker,l=0.0,kick={cy},tilt={wz.item()};
map:line=(cx, cy) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag" ;
ealign,dx={dx.item()},dy={dy.item()} ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact={str(exact).lower()} ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=5,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}} ;
ptc_track_end ;
ptc_end ;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
C = Corrector('C', cx=cx, cy=cy, dp=dp)
res = C(state, alignment=align, data={**C.table(), **error})
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.0, 0.0014941712485121669, 0.0, -0.004875187409743301]
[-6.938893903907228e-18, 0.0014941712485121667, 0.0, -0.004875187409743301]
[6.938893903907228e-18, 2.168404344971009e-19, 0.0, 0.0]
[5]:
# Deviation/error variables
cx = +0.001
cy = -0.005
dp = 0.005
state = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
dx = torch.tensor(+0.01, dtype=torch.float64)
dy = torch.tensor(-0.01, dtype=torch.float64)
dz = torch.tensor(0.0, dtype=torch.float64)
wx = torch.tensor(0.0, dtype=torch.float64)
wy = torch.tensor(0.0, dtype=torch.float64)
wz = torch.tensor(torch.pi, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
C = Corrector('C', cx, cy, dp)
# Each element has two variant of a call method
# In the first case only state is passed, it is transformed using parameters specified on initializaton
print(C(state))
print()
# Deviation errors can be also passed to call method
# These variables are added to corresponding parameters specified on initializaton
# For example, element lenght can changed
print(C(state, data={**C.table(), **{'cx': -cx, 'cy': -cy}}))
print()
# In the above C.table() creates default deviation dictionary (with zero values for each deviaton)
# {**C.table(), **{'cx': -cx, 'cy': -cy}} replaces the 'cx' and 'cy' key values
# Additionaly, alignment errors are passed as deivation variables
# They are used if alignment flag is raised
print(C(state, data={**C.table(), **error}, alignment=True))
print()
# The following elements can be made equivalent using deviation variables
CA = Corrector('CA', cx, cy, dp)
CB = Corrector('CB', cx - 0.001, cy, dp)
print(CA(state) - CB(state, data={**CB.table(), **{'cx': + 0.001}}))
tensor([ 0.0000, 0.0010, 0.0000, -0.0050], dtype=torch.float64)
tensor([0., 0., 0., 0.], dtype=torch.float64)
tensor([ 0.0000, -0.0010, 0.0000, 0.0050], dtype=torch.float64)
tensor([0., 0., 0., 0.], dtype=torch.float64)
[6]:
# Mapping over a set of initial conditions
# Call method can be used to map over a set of initial conditions
# Note, device can be set to cpu or gpu via base element classvariables
cx = +0.001
cy = -0.005
dp = 0.005
dx = torch.tensor(+0.01, dtype=torch.float64)
dy = torch.tensor(-0.01, dtype=torch.float64)
dz = torch.tensor(0.0, dtype=torch.float64)
wx = torch.tensor(0.0, dtype=torch.float64)
wy = torch.tensor(0.0, dtype=torch.float64)
wz = torch.tensor(torch.pi, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
C = Corrector('C', cx, cy, dp)
state = 1.0E-3*torch.randn((512, 4), dtype=C.dtype, device=C.device)
print(torch.vmap(C)(state).shape)
# To map over deviations parameters a wrapper function (or a lambda expression) can be used
def wrapper(state, cx, cy):
return C(state, data={**C.table(), **{'cx': cx, 'cy': cy}})
cx = 1.0E-3*torch.randn(512, dtype=C.dtype, device=C.device)
cy = 1.0E-3*torch.randn(512, dtype=C.dtype, device=C.device)
print(torch.vmap(wrapper)(state, cx, cy).shape)
torch.Size([512, 4])
torch.Size([512, 4])
[7]:
# Differentiability
# Both call methods are differentiable
# Derivative with respect to state can be computed directly
# For deviation variables, wrapping is required
cx = +0.001
cy = -0.005
dp = 0.005
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
dx = torch.tensor(+0.01, dtype=torch.float64)
dy = torch.tensor(-0.01, dtype=torch.float64)
dz = torch.tensor(0.0, dtype=torch.float64)
wx = torch.tensor(0.0, dtype=torch.float64)
wy = torch.tensor(0.0, dtype=torch.float64)
wz = torch.tensor(torch.pi, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
C = Corrector('C', cx, cy, dp)
# Compute derivative with respect to state
print(torch.func.jacrev(C)(state))
print()
# Compute derivative with respect to a deviation variable
dcx = torch.tensor(0.0, dtype=torch.float64)
dcy = torch.tensor(0.0, dtype=torch.float64)
dc = torch.stack([dcx, dcy])
def wrapper(state, dc):
dcx, dcy = dc
return C(state, data={**C.table(), **{'cx': dcx, 'cy': dcy}})
print(torch.func.jacrev(wrapper, 1)(state, dc))
print()
tensor([[1., 0., 0., 0.],
[0., 1., 0., 0.],
[0., 0., 1., 0.],
[0., 0., 0., 1.]], dtype=torch.float64)
tensor([[0., 0.],
[1., 0.],
[0., 0.],
[0., 1.]], dtype=torch.float64)
Example-12: Gradient (element)
[1]:
# Comparison of gradient element with MADX-PTC and other features
[2]:
from pathlib import Path
from os import system
import torch
from model.library.gradient import Gradient
[3]:
# Tracking
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
exact = True
align = False
kn = +5.0E-3
ks = -2.5E-3
dp = 0.005
state = torch.tensor([0.001, 0.0, -0.005, 0.0], dtype=torch.float64)
qx, px, qy, py = state.tolist()
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.05, dtype=torch.float64)
wx = align*torch.tensor(0.005, dtype=torch.float64)
wy = align*torch.tensor(-0.005, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
code = f"""
mag: multipole,knl={{0.0,{kn}}},ksl={{0.0,{ks}}};
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag" ;
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()} ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact={str(exact).lower()} ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=5,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}} ;
ptc_track_end ;
ptc_end ;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
G = Gradient('G', kn=kn, ks=ks, dp=dp)
res = G(state, alignment=align, data={**G.table(), **error})
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.001, 7.5e-06, -0.005, -2.75e-05]
[0.001, 7.5e-06, -0.005, -2.75e-05]
[0.0, 0.0, 0.0, 0.0]
[4]:
# Tracking (alignment)
ptc = Path('ptc')
obs = Path('track.obs0001.p0001')
exact = True
align = True
kn = +5.0E-3
ks = -2.5E-3
dp = 0.005
state = torch.tensor([0.001, 0.0, -0.005, 0.0], dtype=torch.float64)
qx, px, qy, py = state.tolist()
dx = align*torch.tensor(0.05, dtype=torch.float64)
dy = align*torch.tensor(-0.02, dtype=torch.float64)
dz = align*torch.tensor(0.05, dtype=torch.float64)
wx = align*torch.tensor(0.005, dtype=torch.float64)
wy = align*torch.tensor(-0.005, dtype=torch.float64)
wz = align*torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
code = f"""
mag: multipole,knl={{0.0,{kn}}},ksl={{0.0,{ks}}};
map:line=(mag) ;
beam,energy=1.0E+6,particle=electron ;
set,format="20.20f","-20s" ;
use,period=map ;
select,flag=error,pattern="mag" ;
ealign,dx={dx.item()},dy={dy.item()},ds={dz.item()},dphi={wx.item()},dtheta={wy.item()},dpsi={wz.item()} ;
ptc_create_universe,sector_nmul_max=10,sector_nmul=10 ;
ptc_create_layout,model=1,method=6,nst=1000,exact={str(exact).lower()} ;
ptc_setswitch,fringe=false,time=true,totalpath=true,exact_mis=true ;
ptc_align ;
ptc_start,x={qx},px={px},y={qy},py={py},pt={dp},t=0.0 ;
ptc_track,icase=5,deltap=0.,turns=1,file=track,maxaper={{1.,1.,1.,1.,1.,1.}} ;
ptc_track_end ;
ptc_end ;
"""
with ptc.open('w') as stream:
stream.write(code)
system(f'madx < {str(ptc)} > /dev/null')
with obs.open('r') as stream:
for line in stream:
continue
_, _, qx, px, qy, py, *_ = line.split()
ref = torch.tensor([float(x) for x in (qx, px, qy, py)], dtype=torch.float64)
G = Gradient('G', kn=kn, ks=ks, dp=dp)
res = G(state, alignment=align, data={**G.table(), **error})
print(ref.tolist())
print(res.tolist())
print((ref - res).tolist())
ptc.unlink()
obs.unlink()
[0.000991887042015914, 0.00016412084104346932, -0.005011606734840507, 0.00023479809553215934]
[0.0009918870420159223, 0.00016412084104346948, -0.005011606734840506, 0.00023479809553215904]
[-8.239936510889834e-18, -1.6263032587282567e-19, -8.673617379884035e-19, 2.981555974335137e-19]
[5]:
# Deviation/error variables
kn = +5.0E-3
ks = -2.5E-3
dp = 0.005
state = torch.tensor([0.001, 0.0, -0.005, 0.0], dtype=torch.float64)
dx = torch.tensor(+0.01, dtype=torch.float64)
dy = torch.tensor(-0.01, dtype=torch.float64)
dz = torch.tensor(0.0, dtype=torch.float64)
wx = torch.tensor(0.0, dtype=torch.float64)
wy = torch.tensor(0.0, dtype=torch.float64)
wz = torch.tensor(torch.pi, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
G = Gradient('G', kn, ks, dp)
# Each element has two variant of a call method
# In the first case only state is passed, it is transformed using parameters specified on initializaton
print(G(state))
print()
# Deviation errors can be also passed to call method
# These variables are added to corresponding parameters specified on initializaton
# For example, element lenght can changed
print(G(state, data={**G.table(), **{'kn': -kn, 'ks': -ks}}))
print()
# In the above G.table() creates default deviation dictionary (with zero values for each deviaton)
# {**G.table(), **{'kn': -kn, 'ks': -ks}} replaces the 'kn' and 'ks' key values
# Additionaly, alignment errors are passed as deivation variables
# They are used if alignment flag is raised
print(G(state, data={**G.table(), **error}, alignment=True))
print()
# The following elements can be made equivalent using deviation variables
GA = Gradient('GA', kn, ks, dp)
GB = Gradient('GB', kn - 0.001, ks, dp)
print(GA(state) - GB(state, data={**GB.table(), **{'kn': + 0.001}}))
tensor([ 1.0000e-03, 7.5000e-06, -5.0000e-03, -2.7500e-05],
dtype=torch.float64)
tensor([ 0.0010, 0.0000, -0.0050, 0.0000], dtype=torch.float64)
tensor([ 1.0000e-03, 3.2500e-05, -5.0000e-03, 4.7500e-05],
dtype=torch.float64)
tensor([0., 0., 0., 0.], dtype=torch.float64)
[6]:
# Mapping over a set of initial conditions
# Call method can be used to map over a set of initial conditions
# Note, device can be set to cpu or gpu via base element classvariables
kn = +5.0E-3
ks = -2.5E-3
dp = 0.005
dx = torch.tensor(+0.01, dtype=torch.float64)
dy = torch.tensor(-0.01, dtype=torch.float64)
dz = torch.tensor(0.0, dtype=torch.float64)
wx = torch.tensor(0.0, dtype=torch.float64)
wy = torch.tensor(0.0, dtype=torch.float64)
wz = torch.tensor(torch.pi, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
G = Gradient('G', kn, ks, dp)
state = 1.0E-3*torch.randn((512, 4), dtype=G.dtype, device=G.device)
print(torch.vmap(G)(state).shape)
# To map over deviations parameters a wrapper function (or a lambda expression) can be used
def wrapper(state, kn, ks):
return G(state, data={**G.table(), **{'kn': kn, 'ks': ks}})
kn = 1.0E-3*torch.randn(512, dtype=G.dtype, device=G.device)
ks = 1.0E-3*torch.randn(512, dtype=G.dtype, device=G.device)
print(torch.vmap(wrapper)(state, kn, ks).shape)
torch.Size([512, 4])
torch.Size([512, 4])
[7]:
# Differentiability
# Both call methods are differentiable
# Derivative with respect to state can be computed directly
# For deviation variables, wrapping is required
kn = +5.0E-3
ks = -2.5E-3
dp = 0.005
state = torch.tensor([0.001, 0.0, -0.005, 0.0], dtype=torch.float64)
dx = torch.tensor(+0.01, dtype=torch.float64)
dy = torch.tensor(-0.01, dtype=torch.float64)
dz = torch.tensor(0.0, dtype=torch.float64)
wx = torch.tensor(0.0, dtype=torch.float64)
wy = torch.tensor(0.0, dtype=torch.float64)
wz = torch.tensor(torch.pi, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
G = Gradient('G', kn, ks, dp)
# Compute derivative with respect to state
print(torch.func.jacrev(G)(state))
print()
# Compute derivative with respect to a deviation variable
dkn = torch.tensor(0.0, dtype=torch.float64)
dks = torch.tensor(0.0, dtype=torch.float64)
dk = torch.stack([dkn, dks])
def wrapper(state, dk):
dkn, dks = dk
return G(state, data={**G.table(), **{'kn': dkn, 'ks': dks}})
print(torch.func.jacrev(wrapper, 1)(state, dk))
print()
tensor([[ 1.0000, 0.0000, 0.0000, 0.0000],
[-0.0050, 1.0000, -0.0025, 0.0000],
[ 0.0000, 0.0000, 1.0000, 0.0000],
[-0.0025, 0.0000, 0.0050, 1.0000]], dtype=torch.float64)
tensor([[-0.0000, 0.0000],
[-0.0010, -0.0050],
[-0.0000, 0.0000],
[-0.0050, 0.0010]], dtype=torch.float64)
Example-13: Linear (element)
[1]:
# Can be used to model elements as linear transformations
# Constant offset can be used to model first order dispersion
[2]:
import torch
from model.library.quadrupole import Quadrupole
from model.library.dipole import Dipole
from model.library.linear import Linear
[3]:
# Linear quadrupole
length = 1.0
kn = - 2.0
ks = + 1.5
dp = 0.0
Q = Quadrupole('Q', length, kn, ks, dp)
state = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
matrix = torch.func.jacrev(lambda state, dp: Q(state, data={**Q.table(), **{'dp': dp}}), 0)(state, Q.dp)
vector = torch.func.jacrev(lambda state, dp: Q(state, data={**Q.table(), **{'dp': dp}}), 1)(state, Q.dp)
length = 1.0
kn = - 2.0
ks = + 1.5
dp = 0.0001
Q = Quadrupole('Q', length, kn, ks, dp)
L = Linear('L', (dp*vector).tolist(), matrix.tolist())
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
print(Q(state).tolist())
print(L(state).tolist())
print((Q(state) - L(state)).tolist())
[0.012284014325104016, 0.013015328226371463, 0.005866573649483532, 0.01748719571870364]
[0.012284330668424102, 0.013015814342968814, 0.005867420763768485, 0.01748647747810468]
[-3.163433200861071e-07, -4.861165973507608e-07, -8.471142849530294e-07, 7.182405989576701e-07]
[4]:
# Linear dipole
length = 2.0
angle = 0.05
e1 = 0.025
e2 = 0.025
dp = 0.0
D = Dipole('D', length, angle, e1, e2, dp)
state = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
matrix = torch.func.jacrev(lambda state, dp: D(state, data={**D.table(), **{'dp': dp}}), 0)(state, D.dp)
vector = torch.func.jacrev(lambda state, dp: D(state, data={**D.table(), **{'dp': dp}}), 1)(state, D.dp)
length = 2.0
angle = 0.05
e1 = 0.025
e2 = 0.025
dp = 0.0001
D = Dipole('D', length, angle, e1, e2, dp)
L = Linear('L', (dp*vector).tolist(), matrix.tolist())
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
print(D(state).tolist())
print(L(state).tolist())
print((D(state) - L(state)).tolist())
[2.8326139356223135e-06, -0.005001000818821848, -0.002994615078158236, 0.001004198140800915]
[9.165104284458664e-06, -0.004994998958072864, -0.002993748697591074, 0.001004997134048961]
[-6.33249034883635e-06, -6.001860748984511e-06, -8.663805671619597e-07, -7.989932480460815e-07]
Example-14: BPM (element)
[1]:
from pathlib import Path
from os import system
import torch
from model.library.drift import Drift
from model.library.bpm import BPM
[2]:
# BPM acts as identity transformation with calibration error
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
B = BPM('B', direction='forward')
B(state)
[2]:
tensor([ 0.0100, -0.0050, -0.0050, 0.0010], dtype=torch.float64)
[3]:
# Calibration errors can be passed as deviation variables
# qx -> (1 + xx) qx + xy qy
# qy -> yx qx + (1 + yy) qy
B.table()
[3]:
{'xx': tensor(0., dtype=torch.float64),
'xy': tensor(0., dtype=torch.float64),
'yx': tensor(0., dtype=torch.float64),
'yy': tensor(0., dtype=torch.float64),
'dx': tensor(0., dtype=torch.float64),
'dy': tensor(0., dtype=torch.float64),
'dz': tensor(0., dtype=torch.float64),
'wx': tensor(0., dtype=torch.float64),
'wy': tensor(0., dtype=torch.float64),
'wz': tensor(0., dtype=torch.float64)}
[4]:
# Transform to BPM frame and back to beam frame
xx = torch.tensor(+0.05, dtype=torch.float64)
xy = torch.tensor(+0.01, dtype=torch.float64)
yx = torch.tensor(+0.05, dtype=torch.float64)
yy = torch.tensor(-0.06, dtype=torch.float64)
B = BPM('B', direction='forward')
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
print(state)
state = B(state, data={**B.table(), **{'xx': xx, 'xy': xy, 'yx': yx, 'yy': yy}})
print(state)
B.direction = 'inverse'
state = B(state, data={**B.table(), **{'xx': xx, 'xy': xy, 'yx': yx, 'yy': yy}})
print(state)
tensor([ 0.0100, -0.0050, -0.0050, 0.0010], dtype=torch.float64)
tensor([ 0.0105, -0.0048, -0.0042, 0.0011], dtype=torch.float64)
tensor([ 0.0100, -0.0050, -0.0050, 0.0010], dtype=torch.float64)
[5]:
# Transform to BPM frame and back to beam frame using a pair of BPMS
xx = torch.tensor(+0.05, dtype=torch.float64)
xy = torch.tensor(+0.01, dtype=torch.float64)
yx = torch.tensor(+0.05, dtype=torch.float64)
yy = torch.tensor(-0.06, dtype=torch.float64)
BA = BPM('B', direction='forward')
BB = BPM('B', direction='inverse')
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
print(state)
state = BA(state, data={**BA.table(), **{'xx': xx, 'xy': xy, 'yx': yx, 'yy': yy}})
print(state)
state = BB(state, data={**BB.table(), **{'xx': xx, 'xy': xy, 'yx': yx, 'yy': yy}})
print(state)
tensor([ 0.0100, -0.0050, -0.0050, 0.0010], dtype=torch.float64)
tensor([ 0.0105, -0.0048, -0.0042, 0.0011], dtype=torch.float64)
tensor([ 0.0100, -0.0050, -0.0050, 0.0010], dtype=torch.float64)
[6]:
# Differentiability
B = BPM('B', direction='forward')
D = Drift('D', 1.0)
xx = torch.tensor(+0.05, dtype=torch.float64)
xy = torch.tensor(+0.01, dtype=torch.float64)
yx = torch.tensor(+0.05, dtype=torch.float64)
yy = torch.tensor(-0.06, dtype=torch.float64)
error = torch.stack([xx, xy, yx, yy])
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
def line(state, error):
xx, xy, yx, yy = error
state = D(state)
state = B(state, data={**B.table(), **{'xx': xx, 'xy': xy, 'yx': yx, 'yy': yy}})
return state
print(torch.func.jacrev(line, 1)(state, error))
def line(state, error):
xx, xy, yx, yy = error
state = D(state)
B.direction = 'forward'
state = B(state, data={**B.table(), **{'xx': xx, 'xy': xy, 'yx': yx, 'yy': yy}})
B.direction = 'inverse'
state = B(state, data={**B.table(), **{'xx': xx, 'xy': xy, 'yx': yx, 'yy': yy}})
return state
print(torch.func.jacrev(line, 1)(state, error))
tensor([[ 5.0000e-03, -4.0000e-03, 0.0000e+00, 0.0000e+00],
[ 4.5880e-03, -2.4404e-04, -1.0625e-03, 5.6516e-05],
[ 0.0000e+00, 0.0000e+00, 5.0000e-03, -4.0000e-03],
[-4.8809e-05, 5.1249e-03, 1.1303e-05, -1.1868e-03]],
dtype=torch.float64)
tensor([[ 0.0000e+00, 8.6736e-19, 0.0000e+00, -5.4888e-19],
[ 0.0000e+00, 0.0000e+00, 3.3881e-20, 0.0000e+00],
[-2.7105e-19, 0.0000e+00, 8.6736e-19, 0.0000e+00],
[ 2.1684e-19, 3.9302e-19, -3.3881e-21, 2.1684e-19]],
dtype=torch.float64)
[7]:
# Alignment support
xx = torch.tensor(+0.05, dtype=torch.float64)
xy = torch.tensor(+0.01, dtype=torch.float64)
yx = torch.tensor(+0.05, dtype=torch.float64)
yy = torch.tensor(-0.06, dtype=torch.float64)
dx = torch.tensor(0.05, dtype=torch.float64)
dy = torch.tensor(-0.02, dtype=torch.float64)
dz = torch.tensor(0.05, dtype=torch.float64)
wx = torch.tensor(0.005, dtype=torch.float64)
wy = torch.tensor(-0.005, dtype=torch.float64)
wz = torch.tensor(0.1, dtype=torch.float64)
error = {'dx': dx, 'dy': dy, 'dz': dz, 'wx': wx, 'wy': wy, 'wz': wz}
B = BPM('B', direction='forward')
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
state = B(state, data={**B.table(), **{'xx': xx, 'xy': xy, 'yx': yx, 'yy': yy}, **error})
print(state)
state = torch.tensor([0.01, -0.005, -0.005, 0.001], dtype=torch.float64)
state = B(state, data={**B.table(), **{'xx': xx, 'xy': xy, 'yx': yx, 'yy': yy}, **error}, alignment=True)
print(state)
tensor([ 0.0105, -0.0048, -0.0042, 0.0011], dtype=torch.float64)
tensor([ 0.0086, -0.0048, -0.0082, 0.0008], dtype=torch.float64)
Example-15: Line (element)
[1]:
# In this example line usage is illustrated
[2]:
from pathlib import Path
from os import system
import matplotlib
from matplotlib import pyplot as plt
matplotlib.rcParams['text.usetex'] = True
import torch
from model.library.drift import Drift
from model.library.quadrupole import Quadrupole
from model.library.sextupole import Sextupole
from model.library.dipole import Dipole
from model.library.line import Line
[3]:
# Define unique elements
QF = Quadrupole('QF', 0.5, +0.25)
QD = Quadrupole('QD', 0.5, -0.20)
SF = Sextupole('SF', 0.25)
SD = Sextupole('SD', 0.25)
DR = Drift('DR', 0.25)
BM = Dipole('BM', 3.50, torch.pi/8.0)
[4]:
# Define a line
# With propagate flag, values for other flags will be propagated to all root elements (but not to lines!)
FODO = Line('FODO',
[QF, DR, SF, DR, BM, DR, SD, DR, QD, QD, DR, SD, DR, BM, DR, SF, DR, QF],
propagate=True,
dp=0.0,
exact=False,
output=False,
matrix = False)
[5]:
# Similar to elements, lines have to variants of call method
# 1) without deviation variables
state = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
print(FODO(state))
# 2) without deviation variables (defaut dictionary)
state = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
print(FODO(state, data=FODO.table()))
# In both cases, it is possible to apply alignments errors using alignment flag
# Alignment errors can be applied to elements and to line as a whole (see examples below)
tensor([0., 0., 0., 0.], dtype=torch.float64)
tensor([0., 0., 0., 0.], dtype=torch.float64)
[6]:
# Values of deviation variables can be passed only to unique elements
FODO.table(alignment=False)
[6]:
{'QF': {'kn': tensor(0., dtype=torch.float64),
'ks': tensor(0., dtype=torch.float64),
'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64)},
'DR': {'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64)},
'SF': {'ms': tensor(0., dtype=torch.float64),
'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64)},
'BM': {'dw': tensor(0., dtype=torch.float64),
'e1': tensor(0., dtype=torch.float64),
'e2': tensor(0., dtype=torch.float64),
'kn': tensor(0., dtype=torch.float64),
'ks': tensor(0., dtype=torch.float64),
'ms': tensor(0., dtype=torch.float64),
'mo': tensor(0., dtype=torch.float64),
'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64)},
'SD': {'ms': tensor(0., dtype=torch.float64),
'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64)},
'QD': {'kn': tensor(0., dtype=torch.float64),
'ks': tensor(0., dtype=torch.float64),
'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64)}}
[7]:
# Mapping over a set of initial conditions
state = 1.0E-3*torch.randn((512, 4), dtype=FODO.dtype, device=FODO.device)
print(torch.vmap(FODO)(state).shape)
torch.Size([512, 4])
[8]:
# Mapping over a set of initial conditions and parameters
state = 1.0E-3*torch.randn((512, 4), dtype=FODO.dtype, device=FODO.device)
dknqf = 1.0E-3*torch.randn(512, dtype=FODO.dtype, device=FODO.device)
def wrapper(state, dknqf):
data = FODO.table()
data['QF']['kn'] = dknqf
return FODO(state, data=data)
print(torch.vmap(wrapper)(state, dknqf).shape)
torch.Size([512, 4])
[9]:
# Differentiability (state)
state = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
print(torch.func.jacrev(FODO)(state))
tensor([[-0.4395, 15.4433, 0.0000, 0.0000],
[-0.0522, -0.4395, 0.0000, 0.0000],
[ 0.0000, 0.0000, 0.4963, 5.3596],
[ 0.0000, 0.0000, -0.1406, 0.4963]], dtype=torch.float64)
[10]:
# Differentiability (parameter)
state = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
dknqf = torch.tensor(0.0, dtype=torch.float64)
def wrapper(dknqf):
data = FODO.table()
data['QF']['kn'] = dknqf
return FODO(state, data=data)
print(torch.func.jacrev(wrapper)(dknqf))
tensor([0., 0., 0., 0.], dtype=torch.float64)
[11]:
# Differentiability (composed)
state = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
dknqf = torch.tensor(0.0, dtype=torch.float64)
def wrapper(dknqf):
data = FODO.table()
data['QF']['kn'] = dknqf
return torch.func.jacrev(lambda state, data: FODO(state, data=data))(state, data)
print(wrapper(dknqf))
print(torch.func.jacrev(wrapper)(dknqf))
tensor([[-0.4395, 15.4433, 0.0000, 0.0000],
[-0.0522, -0.4395, 0.0000, 0.0000],
[ 0.0000, 0.0000, 0.4963, 5.3596],
[ 0.0000, 0.0000, -0.1406, 0.4963]], dtype=torch.float64)
tensor([[-7.5649, -3.8172, 0.0000, 0.0000],
[ 0.4176, -7.5649, 0.0000, 0.0000],
[ 0.0000, 0.0000, 2.7423, 1.3262],
[ 0.0000, 0.0000, 0.5426, 2.7423]], dtype=torch.float64)
[12]:
%%time
# Tracking
# Note, in general tracking is slow
# This is especially the case for exact integration of elements with large number of slices
qx = torch.linspace(0.0, 0.01, 16, dtype=torch.float64)
px = torch.zeros_like(qx)
qy = torch.zeros_like(qx)
py = torch.zeros_like(qx)
state = torch.stack([qx, px, qy, py]).T
orbit = []
for _ in range(2**10):
state = torch.vmap(FODO)(state)
orbit.append(state)
qx, px, *_ = torch.stack(orbit).swapaxes(0, -1)
CPU times: user 7.19 s, sys: 34 µs, total: 7.19 s
Wall time: 7.19 s
[13]:
# Plot trajectories
plt.figure(figsize=(4, 4))
plt.scatter(qx.cpu().numpy(), px.cpu().numpy(), s=1, color='black')
plt.show()
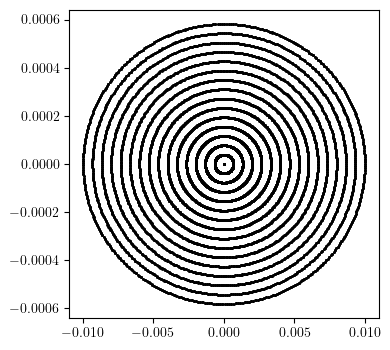
[14]:
%%time
# Output can be collected at each integration step
# Note, container is overwritten at each call
FODO.ns = 0.01
FODO.output = True
state = torch.tensor([+0.01, 0.0, -0.01, 0.0], dtype=torch.float64)
orbit = []
for _ in range(16):
state = FODO(state)
orbit.append(FODO.container_output)
qx, _, qy, _ = torch.vstack(orbit).T
plt.figure(figsize=(8, 2))
plt.scatter(range(len(qx)), qx.cpu().numpy(), s=1, color='blue')
plt.scatter(range(len(qy)), qy.cpu().numpy(), s=1, color='red')
plt.show()
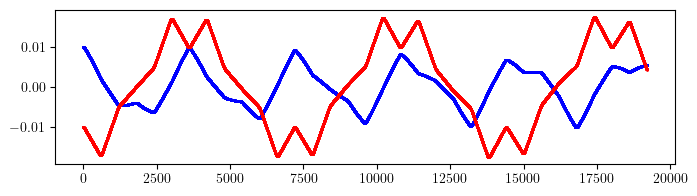
CPU times: user 13.7 s, sys: 149 ms, total: 13.8 s
Wall time: 13.7 s
[15]:
%%time
# Functions can be compiled, but note that dynamo unrolls loops completely (torch 2.4)
# This leads to very long compilation times
FODO.ns = 1
state = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
table = 1.0E-3*torch.randn((512, 4), dtype=FODO.dtype, device=FODO.device)
fodo = torch.compile(FODO)
fodo(state)
CPU times: user 13.3 s, sys: 3.99 s, total: 17.2 s
Wall time: 20.7 s
[15]:
tensor([0., 0., 0., 0.], dtype=torch.float64)
[16]:
%%timeit
FODO(state)
3.98 ms ± 9.28 µs per loop (mean ± std. dev. of 7 runs, 100 loops each)
[17]:
%%timeit
fodo(state)
364 µs ± 1.43 µs per loop (mean ± std. dev. of 7 runs, 1,000 loops each)
[18]:
%%timeit
_ = torch.vmap(FODO)(table)
7.49 ms ± 26.4 µs per loop (mean ± std. dev. of 7 runs, 100 loops each)
[19]:
%%timeit
_ = torch.vmap(fodo)(table)
7.55 ms ± 22.2 µs per loop (mean ± std. dev. of 7 runs, 100 loops each)
[20]:
# Note, compositional operations (map or jacobian seems to break/ignore compiled version)
[21]:
# name (property)
# This property can be used to get/set line name
FODO.name
[21]:
'FODO'
[22]:
# sequence (property)
# Contains ordered sequence of elements
# Elements can be added or removed from it
len(FODO.sequence)
[22]:
18
[23]:
# unique (property)
# name: (type, length, angle) data for all unique elements
FODO.unique
[23]:
{'QF': ('Quadrupole',
tensor(0.5000, dtype=torch.float64),
tensor(0., dtype=torch.float64)),
'DR': ('Drift',
tensor(0.2500, dtype=torch.float64),
tensor(0., dtype=torch.float64)),
'SF': ('Sextupole',
tensor(0.2500, dtype=torch.float64),
tensor(0., dtype=torch.float64)),
'BM': ('Dipole',
tensor(3.5000, dtype=torch.float64),
tensor(0.3927, dtype=torch.float64)),
'SD': ('Sextupole',
tensor(0.2500, dtype=torch.float64),
tensor(0., dtype=torch.float64)),
'QD': ('Quadrupole',
tensor(0.5000, dtype=torch.float64),
tensor(0., dtype=torch.float64))}
[24]:
# length (property)
FODO.length
[24]:
tensor(12., dtype=torch.float64)
[25]:
# angle (property)
FODO.angle
[25]:
tensor(0.7854, dtype=torch.float64)
[26]:
# ns (property)
# This property can be used to get/set number of integration steps to unique elements
# Set value integration steps to all elements
FODO.ns = 10
print(FODO.ns)
# Set ceil(element.length/value) integration steps to each element
FODO.ns = 0.1
print(FODO.ns)
# Set by name or type
FODO.ns = (('DR', 1), ('Sextupole', 0.01))
print(FODO.ns)
{'QF': 10, 'DR': 10, 'SF': 10, 'BM': 10, 'SD': 10, 'QD': 10}
{'QF': 5, 'DR': 3, 'SF': 3, 'BM': 35, 'SD': 3, 'QD': 5}
{'QF': 5, 'DR': 1, 'SF': 25, 'BM': 35, 'SD': 25, 'QD': 5}
[27]:
# order (property)
# This property can be used to get/set integration order to unique elements
# Set value integration steps to all elements
FODO.order = 0
print(FODO.order)
# Set by name or type
FODO.order = (('BM', 1), ('Sextupole', 1))
print(FODO.order)
{'QF': 0, 'DR': 0, 'SF': 0, 'BM': 0, 'SD': 0, 'QD': 0}
{'QF': 0, 'DR': 0, 'SF': 1, 'BM': 1, 'SD': 1, 'QD': 0}
[28]:
# Nested lines
# Note, flags for lines are not propagated
FODO = Line('FODO', [QF, DR, SF, DR, BM, DR, SD, DR, QD, QD, DR, SD, DR, BM, DR, SF, DR, QF], propagate=True, dp=0.0, exact=False, output=False, matrix = False)
RING = Line('RING', 8*[FODO], propagate=True, dp=0.0, exact=False, output=False, matrix = False)
RING.ns = 1
print(RING.ns)
RING.order = 0
print(RING.order)
# Note, sublines are not flattened
print(len(RING.sequence))
{'QF': 1, 'DR': 1, 'SF': 1, 'BM': 1, 'SD': 1, 'QD': 1}
{'QF': 0, 'DR': 0, 'SF': 0, 'BM': 0, 'SD': 0, 'QD': 0}
8
[29]:
# Tracking, mapping and differentiation is similar to flat lines
state = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
RING(state)
[29]:
tensor([0., 0., 0., 0.], dtype=torch.float64)
[30]:
# Deviation table contains unique lines with unique elements (unique by names)
RING.table(alignment=False)
[30]:
{'FODO': {'QF': {'kn': tensor(0., dtype=torch.float64),
'ks': tensor(0., dtype=torch.float64),
'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64)},
'DR': {'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64)},
'SF': {'ms': tensor(0., dtype=torch.float64),
'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64)},
'BM': {'dw': tensor(0., dtype=torch.float64),
'e1': tensor(0., dtype=torch.float64),
'e2': tensor(0., dtype=torch.float64),
'kn': tensor(0., dtype=torch.float64),
'ks': tensor(0., dtype=torch.float64),
'ms': tensor(0., dtype=torch.float64),
'mo': tensor(0., dtype=torch.float64),
'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64)},
'SD': {'ms': tensor(0., dtype=torch.float64),
'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64)},
'QD': {'kn': tensor(0., dtype=torch.float64),
'ks': tensor(0., dtype=torch.float64),
'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64)}}}
[31]:
# If this can be used to pass different values of deviation variables to unique elements
# But values should match for consistent differentiation
LA = Line('LA', [QF, DR, SF, DR, BM, DR, SD, DR, QD, QD, DR, SD, DR, BM, DR, SF, DR, QF], propagate=True, dp=0.0, exact=False, output=False, matrix = False)
LB = Line('LB', [QF, DR, SF, DR, BM, DR, SD, DR, QD, QD, DR, SD, DR, BM, DR, SF, DR, QF], propagate=True, dp=0.0, exact=False, output=False, matrix = False)
RING = Line('RING', [LA, LB], propagate=True, dp=0.0, exact=False, output=False, matrix = False)
state = torch.tensor([0.01, 0.0, 0.01, 0.0], dtype=torch.float64)
kn = torch.tensor(0.01, dtype=torch.float64)
data = RING.table()
data['LA']['QF']['kn'] = kn
data['LB']['QF']['kn'] = kn
print(RING(state, data=data))
kna = torch.tensor(+0.01, dtype=torch.float64)
knb = torch.tensor(-0.01, dtype=torch.float64)
data['LA']['QF']['kn'] = kna
data['LB']['QF']['kn'] = knb
print(RING(state, data=data))
tensor([-0.0047, 0.0005, -0.0045, -0.0014], dtype=torch.float64)
tensor([-0.0055, 0.0005, -0.0048, -0.0014], dtype=torch.float64)
[32]:
# Modulation
FODO = Line('FODO', [QF, DR, SF, DR, BM, DR, SD, DR, QD, QD, DR, SD, DR, BM, DR, SF, DR, QF], propagate=True, dp=0.0, exact=False, output=False, matrix = False)
dkf = 1.0E-3*torch.randn(2**10, dtype=torch.float64)
dkd = 1.0E-3*torch.randn(2**10, dtype=torch.float64)
qx = torch.linspace(0.0, 0.01, 8, dtype=torch.float64)
px = torch.zeros_like(qx)
qy = torch.zeros_like(qx)
py = torch.zeros_like(qx)
state = torch.stack([qx, px, qy, py]).T
orbit = []
data = FODO.table()
for i in range(2**10):
data['QF']['kn'] = dkf[i]
data['QD']['kn'] = dkd[i]
state = torch.vmap(lambda state: FODO(state, data=data))(state)
orbit.append(state)
qx, px, *_ = torch.stack(orbit).swapaxes(0, -1)
plt.figure(figsize=(4, 4))
plt.scatter(qx.cpu().numpy(), px.cpu().numpy(), s=1, color='black')
plt.show()
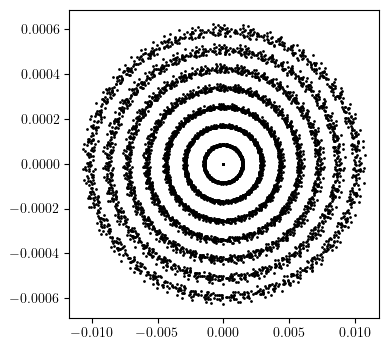
[33]:
# Nested alignment (test without bending)
QF = Quadrupole('QF', 0.5, +0.25)
QD = Quadrupole('QD', 0.5, -0.20)
SF = Sextupole('SF', 0.25)
SD = Sextupole('SD', 0.25)
DR = Drift('DR', 0.25)
BM = Drift('BM', 3.50)
FODO = Line('FODO', [QF, DR, SF, DR, BM, DR, SD, DR, QD, QD, DR, SD, DR, BM, DR, SF, DR, QF], propagate=True, dp=0.0, exact=False, output=False, matrix = False)
state = torch.tensor([+0.01, 0.0, -0.01, 0.0], dtype=torch.float64)
dx = torch.tensor(0.01, dtype=torch.float64)
dx_qf = torch.tensor(0.01, dtype=torch.float64)
dx_qd = torch.tensor(0.01, dtype=torch.float64)
# 2x quadrupoles
data = FODO.table()
data['dx'] = 0*dx
data['QF']['dx'] = 2*dx_qf
data['QD']['dx'] = 2*dx_qd
print(FODO(state, data=data, alignment=True).tolist())
# 1x quadrupoles and 1x fodo
data['dx'] = 1*dx
data['QF']['dx'] = 1*dx_qf
data['QD']['dx'] = 1*dx_qd
print(FODO(state, data=data, alignment=True).tolist())
[0.02090725772744483, 0.0005430498651489654, -0.004962609791574424, 0.0014062973408549748]
[0.02090725772744481, 0.0005430498651489672, -0.004962609791574424, 0.0014062973408549748]
[34]:
# Matrix output and twiss parameters
from twiss import twiss
from twiss import propagate
from twiss import wolski_to_cs
QF = Quadrupole('QF', 0.5, +0.25)
QD = Quadrupole('QD', 0.5, -0.20)
SF = Sextupole('SF', 0.25)
SD = Sextupole('SD', 0.25)
DR = Drift('DR', 0.25)
BM = Dipole('BM', 3.50, torch.pi/8.0)
FODO = Line('FODO', [QF, DR, SF, DR, BM, DR, SD, DR, QD, QD, DR, SD, DR, BM, DR, SF, DR, QF], propagate=True, matrix=True)
FODO.ns = 0.01
state = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
print(torch.func.jacrev(FODO)(state))
print()
out, *ms = FODO.container_matrix
for m in ms:
out = m @ out
print(out)
print()
*_, w = twiss(out)
ws = [w]
for m in FODO.container_matrix:
w = propagate(w, m)
ws.append(w)
ws = torch.stack(ws)
_, bx, _, by = torch.vmap(wolski_to_cs)(ws).T
s = torch.linspace(0.0, 12.0, len(bx), dtype=torch.float64)
plt.figure(figsize=(8, 4))
plt.scatter(s.cpu().numpy(), bx.cpu().numpy(), s=1, color='blue')
plt.scatter(s.cpu().numpy(), by.cpu().numpy(), s=1, color='red')
plt.show()
tensor([[-0.4395, 15.4433, 0.0000, 0.0000],
[-0.0522, -0.4395, 0.0000, 0.0000],
[ 0.0000, 0.0000, 0.4963, 5.3596],
[ 0.0000, 0.0000, -0.1406, 0.4963]], dtype=torch.float64)
tensor([[-0.4395, 15.4433, 0.0000, 0.0000],
[-0.0522, -0.4395, 0.0000, 0.0000],
[ 0.0000, 0.0000, 0.4963, 5.3596],
[ 0.0000, 0.0000, -0.1406, 0.4963]], dtype=torch.float64)
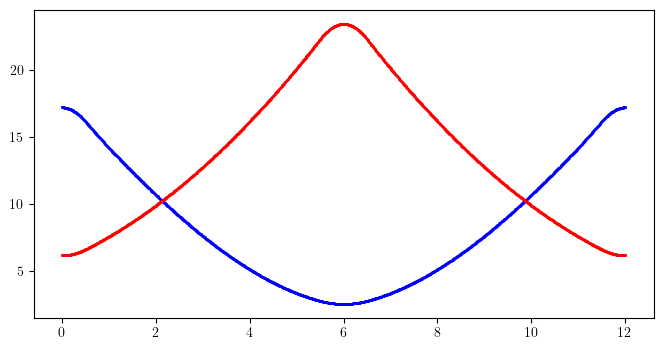
Example-16: Layout
[1]:
# In this example graphical representation of (planar) layout if illustrated
# Layout data can be generated to draw layout in 1D, 2D and 3D along with other curves (given on sliced lattice)
# To avoid explicit dependencies on graphical libraries (matplotlib and plotly), results are returned as dictionaries
[2]:
# Import
import matplotlib
from matplotlib import pyplot as plt
from matplotlib.patches import Rectangle
matplotlib.rcParams['text.usetex'] = True
from plotly import graph_objects
import torch
from twiss import twiss
from twiss import propagate
from twiss import wolski_to_cs
from model.library.drift import Drift
from model.library.quadrupole import Quadrupole
from model.library.sextupole import Sextupole
from model.library.dipole import Dipole
from model.library.bpm import BPM
from model.library.line import Line
from model.command.layout import Layout
[3]:
# Define simple FODO based lattice
QF = Quadrupole('QF', 0.5, +0.20)
QD = Quadrupole('QD', 0.5, -0.19)
SF = Sextupole('SF', 0.25)
SD = Sextupole('SD', 0.25)
DR = Drift('DR', 0.25)
BM = Dipole('BM', 3.50, torch.pi/4.0)
BA = BPM('BA', direction='inverse')
BB = BPM('BB', direction='forward')
FODO = Line('FODO',
[BA, QF, DR, SF, DR, BM, DR, SD, DR, QD, QD, DR, SD, DR, BM, DR, SF, DR, QF, BB],
propagate=True,
dp=0.0,
exact=False,
output=True,
matrix = True)
RING = Line('RING',
4*[FODO],
propagate=True,
dp=0.0,
exact=False,
output=True,
matrix = True)
[4]:
# Perform lattice slicing
RING.ns = 0.05
print(RING.ns)
# Note, setting slices based on length for zero lenght elements sets corresponding number of slices to zero
# This can be used to effectively remove elements from lattice
# For example, it is possible to have two elements are periodicaly switch between them
RING.ns = (('BPM', 1), )
print(RING.ns)
{'BA': 0, 'QF': 10, 'DR': 5, 'SF': 5, 'BM': 70, 'SD': 5, 'QD': 10, 'BB': 0}
{'BA': 1, 'QF': 10, 'DR': 5, 'SF': 5, 'BM': 70, 'SD': 5, 'QD': 10, 'BB': 1}
[5]:
# Compute transport matrices along closed orbit
state = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
print(torch.func.jacrev(RING)(state))
print()
total, *ms = RING.container_matrix
for m in ms:
total = m @ total
print(total)
print()
tensor([[ -0.3382, -17.5116, 0.0000, 0.0000],
[ 0.0506, -0.3382, 0.0000, 0.0000],
[ 0.0000, 0.0000, -0.2976, -6.0422],
[ 0.0000, 0.0000, 0.1508, -0.2976]], dtype=torch.float64)
tensor([[ -0.3382, -17.5116, 0.0000, 0.0000],
[ 0.0506, -0.3382, 0.0000, 0.0000],
[ 0.0000, 0.0000, -0.2976, -6.0422],
[ 0.0000, 0.0000, 0.1508, -0.2976]], dtype=torch.float64)
[6]:
# Compute twiss parameters at slices (entrance of each slice)
# Compute twiss from one-turn matrix at starting location
(nux, nuy), _, w = twiss(total)
# Print fractional tunes
print(f'{nux.item(), nuy.item()}')
# Propagate twiss parametes
ws = [w]
*ms, _ = RING.container_matrix
for m in ms:
w = propagate(w, m)
ws.append(w)
ws = torch.stack(ws)
# Convert to CS and plot beta functions
_, bx, _, by = torch.vmap(wolski_to_cs)(ws).T
plt.figure(figsize=(20, 4))
plt.plot(bx.cpu().numpy(), color='red', label=r'$\beta_x$')
plt.plot(by.cpu().numpy(), color='blue', label=r'$\beta_y$')
plt.xlabel(r'slice \#')
plt.ylabel(r'$\beta$ [m]')
plt.tight_layout()
plt.show()
(0.6950865039372625, 0.7018998427861426)

[7]:
# Generate several trajectories on slice (turn off matrix computation)
RING.matrix = False
state = torch.tensor([+0.01, 0.0, -0.01, 0.0], dtype=torch.float64)
orbit = []
for _ in range(16):
state = RING(state)
orbit.append(RING.container_output.clone())
orbit = torch.stack(orbit)
orbit.shape
[7]:
torch.Size([16, 968, 4])
[8]:
# Set layout
layout = Layout(RING)
[9]:
# Reference orbit (lines and arcs)
# With step = None, returns globals coordinates for elements entrance faces (if the last entry is dropped)
x_entrance, y_entrance, *_ = layout.orbit(flat=False, step=None)
# Step size can be passed to generate smooth closed orbit curve
# Slicing is performed only in arc sections
x, y, *_ = layout.orbit(flat=False, step=0.01)
plt.figure(figsize=(6, 6))
plt.scatter(x_entrance.cpu().numpy(), y_entrance.cpu().numpy(), marker='o', color='black')
plt.plot(x.cpu().numpy(), y.cpu().numpy(), color='black')
plt.tight_layout()
plt.show()
# Note, rotation is anti-clockwise
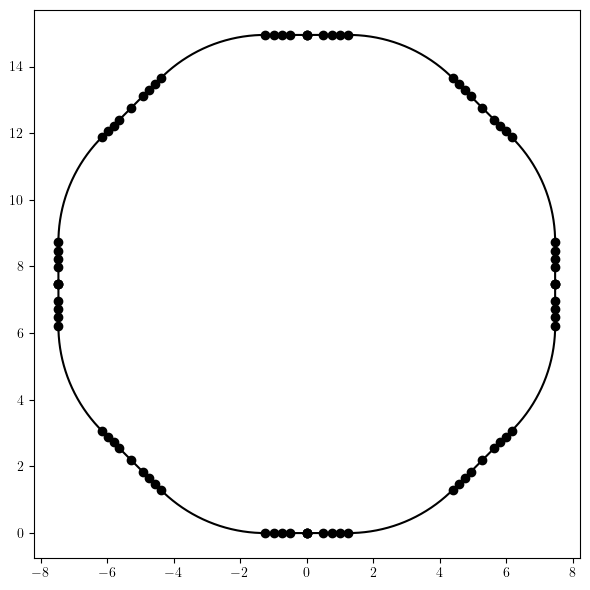
[10]:
# Information about each element
# (name, kind, length, angle)
names, kinds, lengths, angles = zip(*layout.line.layout())
# Element locations in global frame can be computed using orbit method
x, y, *_ = layout.orbit(step=None, flag=False, lengths=lengths, angles=angles)
plt.figure(figsize=(6, 6))
plt.errorbar(x.cpu().numpy(), y.cpu().numpy(), fmt=' ', ms=1, marker='x', color='black')
plt.tight_layout()
plt.show()
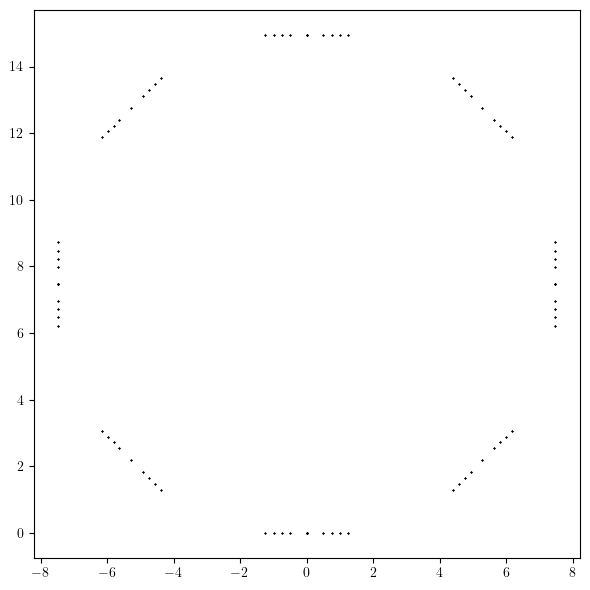
[11]:
# In sliced lattice each element is splitted into one or more slices
# Information about each slice
# (name, kind, length, angle, point)
# Here point gives element entrance face location in global coordinate system
names, kinds, lengths, angles, points = layout.slicing_table()
x, y, *_ = points.T
plt.figure(figsize=(6, 6))
plt.errorbar(x.cpu().numpy(), y.cpu().numpy(), fmt=' ', ms=1, marker='x', color='black')
plt.tight_layout()
plt.show()
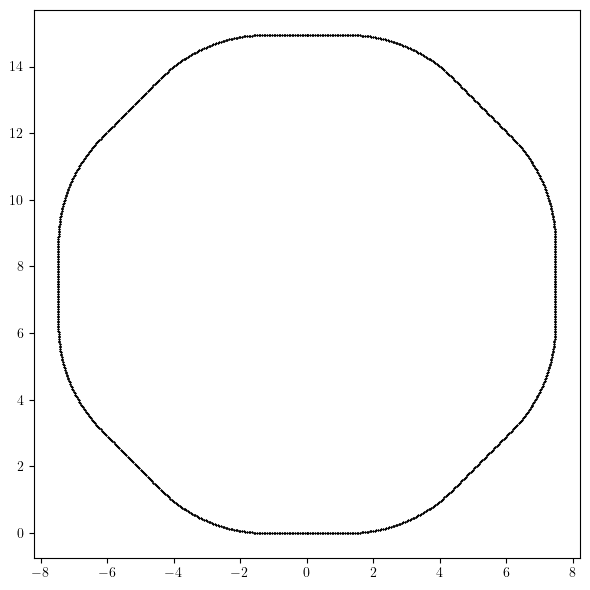
[12]:
# 1D profile (rectangles)
_, _, lengths, *_ = layout.slicing_table()
rectangles, labels = layout.profile_1d(scale=5.0,
shift=-2.5,
text=True,
delta=-4.0,
rotation=90,
exclude=['BPM'])
plt.figure(figsize=(20, 5))
plt.plot(lengths.cumsum(-1).cpu().numpy(), bx.cpu().numpy(), color='red', label=r'$\beta_x$')
plt.plot(lengths.cumsum(-1).cpu().numpy(), by.cpu().numpy(), color='blue', label=r'$\beta_y$')
plt.legend()
for rectangle in rectangles:
plt.gca().add_patch(Rectangle(**rectangle))
for label in labels:
plt.text(**label)
plt.ylim(-5.0, 25.0)
plt.tight_layout()
plt.show()
# Default colors and other parametes are defined in config attribute (layout class variable)
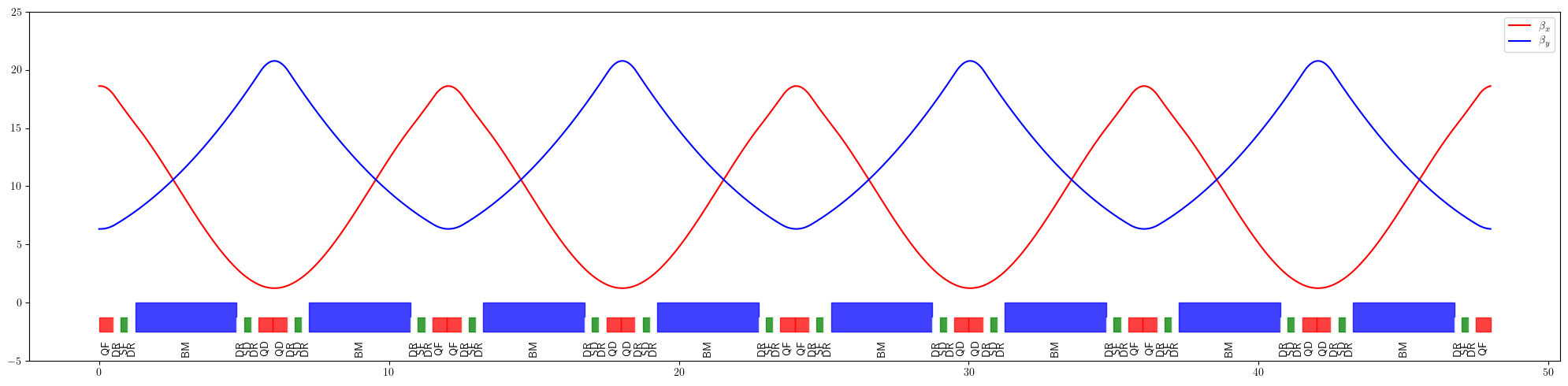
[13]:
# 2D profile and data transformation
# Using angles and global positions, data on slices can be transformed
# In general, data scaling should be adjusted to present transformed data in appealing way\
# Transform data
*_, angles, points = layout.slicing_table()
angles = angles.cumsum(-1)
bx_x = torch.zeros_like(bx)
bx_y = +(0.05*bx + 0.5)
bx_z = torch.zeros_like(bx)
bx_points = torch.stack([bx_x, bx_y, bx_z]).T
bx_x, bx_y, bx_z = torch.vmap(layout.transform)(bx_points, points, angles).T
by_x = torch.zeros_like(by)
by_y = +(0.05*by + 0.5)
by_z = torch.zeros_like(by)
by_points = torch.stack([by_x, by_y, by_z]).T
by_x, by_y, by_z = torch.vmap(layout.transform)(by_points, points, angles).T
# Generate reference orbit
x, y, _ = layout.orbit(flat=False, step=0.01, start=(0, 0))
# Generate layout
blocks, labels = layout.profile_2d(start=(0, 0),
delta=-0.6,
linewidth=1.5,
exclude=['Drift', 'BPM'])
# Plot
plt.figure(figsize=(6, 6))
plt.plot(x, y, color='black')
plt.plot(bx_x, bx_y, color='red', label=r'$\beta_x$')
plt.plot(by_x, by_y, color='blue', label=r'$\beta_y$')
for block in blocks:
plt.errorbar(**block)
for label in labels:
plt.text(**label)
plt.legend()
plt.xlabel(r'x [m]')
plt.ylabel(r'y [m]')
plt.tight_layout()
plt.show()

[14]:
# 3D profile and data transformation
names, kinds, lengths, angles, points = layout.slicing_table()
angles = angles.cumsum(-1)
# Transform orbits
scale = 50.0
qx, _, qy, _ = orbit.swapaxes(0, 1).swapaxes(0, -1)
q_x = scale*torch.zeros_like(qx)
q_y = scale*qx
q_z = scale*qy
q_points = torch.stack([q_x, q_y, q_z]).swapaxes(0, -1)
q_x, q_y, q_z = torch.vmap(layout.transform)(q_points, points, angles).swapaxes(0, -1)
# Select data at BPMs
q_x_bpm = []
q_y_bpm = []
q_z_bpm = []
for kind, qx, qy, qz in zip(kinds, q_x.T, q_y.T, q_z.T):
if kind == 'BPM':
q_x_bpm.append(qx)
q_y_bpm.append(qy)
q_z_bpm.append(qz)
q_x_bpm = torch.stack(q_x_bpm)
q_y_bpm = torch.stack(q_y_bpm)
q_z_bpm = torch.stack(q_z_bpm)
# Generate reference orbit
x, y, z = layout.orbit(flat=False, step=0.01, start=(0, 0))
# Generate layout (can be saved as html with write_html method)
blocks = layout.profile_3d(scale=1.75)
# Plot
figure = graph_objects.Figure(
data=[
graph_objects.Scatter3d(
x=x.numpy(),
y=y.numpy(),
z=z.numpy(),
mode='lines',
name='Orbit',
line=dict(color='black',width=2.0,dash='solid'),
opacity=0.75,
showlegend=True
),
graph_objects.Scatter3d(
x=q_x.flatten().numpy(),
y=q_y.flatten().numpy(),
z=q_z.flatten().numpy(),
mode='lines',
name='Trajectory',
line=dict(color='black',width=1.0,dash='solid'),
opacity=0.50,
showlegend=True
),
graph_objects.Scatter3d(
x=q_x_bpm.flatten().numpy(),
y=q_y_bpm.flatten().numpy(),
z=q_z_bpm.flatten().numpy(),
mode='markers',
name='Projection',
marker=dict(color='red',size=1.5),
opacity=0.50,
showlegend=True
),
*[graph_objects.Mesh3d(block) for block in blocks]
]
)
figure.update_layout(
scene=dict(
xaxis=dict(visible=False, range=[-20,20]),
yaxis=dict(visible=False, range=[-20,20]),
zaxis=dict(visible=False, range=[-5,5]),
aspectratio=dict(x=1, y=1, z=1/4),
annotations=[]
),
margin=dict(l=0, r=0, t=0, b=0),
legend=dict(orientation='v', x=0., y=1., xanchor='left', yanchor='top'),
hoverlabel=dict(font_size=12, font_family="Rockwell", font_color='white'),
legend_groupclick='toggleitem'
)
figure.show()
Example-17: LOGO
[1]:
# In this example model logo is created following several steps
# - define fodo based lattice
# - adjust fractional tunes (move horizontal tune close to 2/3)
# - correct chromaticity
# - compute phase space trajectories at a single location
# - choose one lovely trajectory in qx-px and generate initial set
# - slice lattice
# - compute orbits for all initials
# - transform data to layout frame
# - generate 3d layout
# - select a view and save logo
[2]:
# Import
import matplotlib
from matplotlib import pyplot as plt
from matplotlib.patches import Rectangle
matplotlib.rcParams['text.usetex'] = True
from plotly import graph_objects
import torch
from twiss import twiss
from twiss import propagate
from twiss import advance
from twiss import wolski_to_cs
from ndmap.pfp import parametric_fixed_point
from ndmap.evaluate import evaluate
from model.library.drift import Drift
from model.library.quadrupole import Quadrupole
from model.library.sextupole import Sextupole
from model.library.dipole import Dipole
from model.library.bpm import BPM
from model.library.line import Line
from model.command.layout import Layout
[3]:
# Define simple FODO based lattice
QF = Quadrupole('QF', 0.5, +0.20)
QD = Quadrupole('QD', 0.5, -0.19)
SF = Sextupole('SF', 0.25)
SD = Sextupole('SD', 0.25)
DR = Drift('DR', 0.25)
BM = Dipole('BM', 3.50, torch.pi/4.0)
BA = BPM('BA', direction='inverse')
BB = BPM('BB', direction='forward')
FODO = Line('FODO',
[BA, QF, DR, SF, DR, BM, DR, SD, DR, QD, QD, DR, SD, DR, BM, DR, SF, DR, QF, BB],
propagate=True,
dp=0.0,
exact=False,
output=False,
matrix=False)
RING = Line('RING',
4*[FODO],
propagate=True,
dp=0.0,
exact=False,
output=False,
matrix=False)
[4]:
# Slice lattice
RING.ns = 0.05
RING.ns = (('BPM', 1), )
print(RING.ns)
{'BA': 1, 'QF': 10, 'DR': 5, 'SF': 5, 'BM': 70, 'SD': 5, 'QD': 10, 'BB': 1}
[5]:
# Compute tunes
state = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
matrix = torch.func.jacrev(RING)(state)
print(matrix)
print()
(nux, nuy), *_ = twiss(matrix)
print(nux)
print(nuy)
print()
tensor([[ -0.3382, -17.5116, 0.0000, 0.0000],
[ 0.0506, -0.3382, 0.0000, 0.0000],
[ 0.0000, 0.0000, -0.2976, -6.0422],
[ 0.0000, 0.0000, 0.1508, -0.2976]], dtype=torch.float64)
tensor(0.6951, dtype=torch.float64)
tensor(0.7019, dtype=torch.float64)
[6]:
%%time
# Adjust fractional tunes
# Define tune function
def tune(dkn):
dknf, dknd = dkn
data = RING.table()
data['FODO']['QF']['kn'] = dknf
data['FODO']['QD']['kn'] = dknd
matrix = torch.func.jacrev(lambda state, data: RING(state, data=data))(state, data)
tunes, *_ = twiss(matrix)
return tunes
# Define target tune values
nux_target = torch.tensor(0.667, dtype=torch.float64)
nuy_target = torch.tensor(0.700, dtype=torch.float64)
# Perform correction
dkn = torch.tensor([0.0, 0.0], dtype=torch.float64)
for _ in range(8):
dnux = nux - nux_target
dnuy = nuy - nuy_target
(dknf, dknd) = dkn = - torch.linalg.pinv(torch.func.jacrev(tune)(dkn)) @ torch.stack([dnux, dnuy])
nux, nuy = tune(dkn)
QF.kn = (QF.kn + dknf).item()
QD.kn = (QD.kn + dknd).item()
print(tune(dkn) - torch.stack([nux_target, nuy_target]))
tensor([-0.0236, -0.0015], dtype=torch.float64)
tensor([-0.0014, -0.0001], dtype=torch.float64)
tensor([8.9454e-05, 1.0546e-05], dtype=torch.float64)
tensor([-3.6114e-07, -4.0399e-08], dtype=torch.float64)
tensor([-9.9395e-11, -1.1213e-11], dtype=torch.float64)
tensor([ 4.4409e-16, -4.4409e-16], dtype=torch.float64)
tensor([0.0000e+00, 3.3307e-16], dtype=torch.float64)
tensor([0.0000e+00, 6.6613e-16], dtype=torch.float64)
CPU times: user 1min 33s, sys: 458 ms, total: 1min 34s
Wall time: 1min 34s
[7]:
%%time
# Chromaticity
def scan(data, name, target):
for key, value in data.items():
if isinstance(value, dict):
scan(value, name, target)
elif key == name:
data[key] = target
def ring(state, dp, dms):
dp, *_ = dp
dmsf, dmsd, *_ = dms
data = RING.table()
scan(data, 'dp', dp)
data['FODO']['SF']['ms'] = dmsf
data['FODO']['SD']['ms'] = dmsd
return RING(state, data=data)
fp = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
dp = torch.tensor([0.0], dtype=torch.float64)
dms = torch.tensor([0.0, 0.0], dtype=torch.float64)
pfp, *_ = parametric_fixed_point((1, ), fp, [dp], ring, dms)
# Define transformation around fixed point
def pfp_ring(state, dp, dms):
return ring(state + evaluate(pfp, [dp]), dp, dms) - evaluate(pfp, [dp])
# Tune
def tune(dp, dms):
matrix = torch.func.jacrev(pfp_ring)(state, dp, dms)
tunes, *_ = twiss(matrix)
return tunes
# Chromaticity
def chromaticity(dms):
return torch.func.jacrev(tune)(dp, dms)
# Initial chomaticity values
psix, psiy = chromaticity(dms).squeeze()
# Define target tune values
psix_target = torch.tensor(5.0, dtype=torch.float64)
psiy_target = torch.tensor(5.0, dtype=torch.float64)
# Perform correction
dpsix = psix - psix_target
dpsiy = psiy - psiy_target
(dmsf, dmsd) = dms = - torch.linalg.pinv((torch.func.jacrev(chromaticity)(dms)).squeeze()) @ torch.stack([dpsix, dpsiy])
SF.ms = (SF.ms + dmsf).item()
SD.ms = (SD.ms + dmsd).item()
dms *= 0.0
print(chromaticity(dms).squeeze() - torch.stack([psix_target, psiy_target]))
tensor([-5.3291e-15, -2.6645e-14], dtype=torch.float64)
CPU times: user 1min 31s, sys: 695 ms, total: 1min 32s
Wall time: 1min 32s
[8]:
%%time
# Generate and plot phase space trajectories
qx = torch.linspace(0.10, 0.30, 8, dtype=torch.float64)
px = torch.zeros_like(qx)
qy = torch.zeros_like(qx)
py = torch.zeros_like(qx)
state = torch.stack([qx, px, qy, py]).T
orbit = []
for _ in range(2**10):
state = torch.vmap(RING)(state)
orbit.append(state)
qx, px, *_ = torch.stack(orbit).swapaxes(0, -1)
plt.figure(figsize=(6, 6))
plt.scatter(qx.cpu().numpy(), px.cpu().numpy(), s=1, color='black')
plt.show()
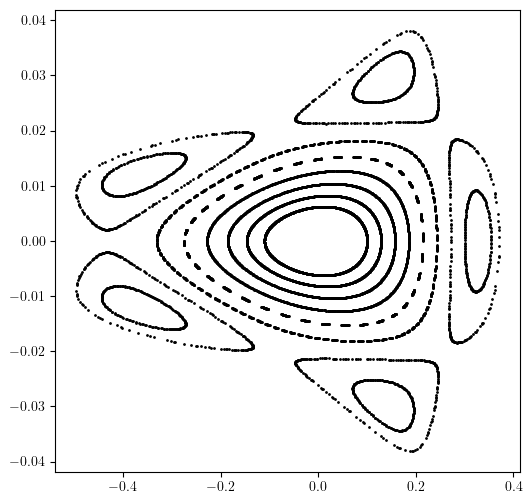
CPU times: user 19min 50s, sys: 197 ms, total: 19min 50s
Wall time: 19min 50s
[9]:
%%time
# Generate selected trajectory on slices
FODO.output = True
RING.output = True
state = torch.tensor([0.27, 0.0, 0.0, 0.0], dtype=torch.float64)
orbit = []
for _ in range(2**10):
state = RING(state)
orbit.append(RING.container_output.clone())
orbit = torch.stack(orbit)
orbit.shape
CPU times: user 12min 17s, sys: 20.1 ms, total: 12min 17s
Wall time: 12min 17s
[9]:
torch.Size([1024, 968, 4])
[10]:
# 3D
layout = Layout(RING)
names, kinds, lengths, angles, points = layout.slicing_table()
angles = angles.cumsum(-1)
# Transform orbits
qx, px, *_ = orbit.swapaxes(0, 1).swapaxes(0, -1)
q_x = torch.zeros_like(qx)
q_y = 3.0*qx
q_z = 30.0*px
q_points = torch.stack([q_x, q_y, q_z]).swapaxes(0, -1)
q_x, q_y, q_z = torch.vmap(layout.transform)(q_points, points, angles).swapaxes(0, -1)
# Select data at BPMs
q_x_bpm = []
q_y_bpm = []
q_z_bpm = []
for kind, qx, qy, qz in zip(kinds, q_x.T, q_y.T, q_z.T):
if kind == 'BPM':
q_x_bpm.append(qx)
q_y_bpm.append(qy)
q_z_bpm.append(qz)
q_x_bpm = torch.stack(q_x_bpm)
q_y_bpm = torch.stack(q_y_bpm)
q_z_bpm = torch.stack(q_z_bpm)
# Generate reference orbit
x, y, z = layout.orbit(flat=False, step=0.01, start=(0, 0))
# Generate layout (can be saved as html with write_html method)
blocks = layout.profile_3d(scale=1.75)
# Plot
figure = graph_objects.Figure(
data=[
graph_objects.Scatter3d(
x=x.numpy(),
y=y.numpy(),
z=z.numpy(),
mode='lines',
name='Orbit',
line=dict(color='black',width=2.0,dash='solid'),
opacity=0.75,
showlegend=True
),
graph_objects.Scatter3d(
x=q_x.flatten().numpy(),
y=q_y.flatten().numpy(),
z=q_z.flatten().numpy(),
mode='lines',
name='Trajectory',
line=dict(color='black',width=1.0,dash='solid'),
opacity=0.10,
showlegend=True
),
graph_objects.Scatter3d(
x=q_x_bpm.flatten().numpy(),
y=q_y_bpm.flatten().numpy(),
z=q_z_bpm.flatten().numpy(),
mode='markers',
name='Projection',
marker=dict(color='red',size=1.5),
opacity=0.10,
showlegend=True
),
*[graph_objects.Mesh3d(block) for block in blocks]
]
)
figure.update_layout(
scene=dict(
xaxis=dict(visible=False, range=[-20,20]),
yaxis=dict(visible=False, range=[-20,20]),
zaxis=dict(visible=False, range=[-5,5]),
aspectratio=dict(x=1, y=1, z=1/4),
annotations=[]
),
margin=dict(l=0, r=0, t=0, b=0),
legend=dict(orientation='v', x=0., y=1., xanchor='left', yanchor='top'),
hoverlabel=dict(font_size=12, font_family="Rockwell", font_color='white'),
legend_groupclick='toggleitem',
plot_bgcolor='rgba(0, 0, 0, 0)',
paper_bgcolor='rgba(0, 0, 0, 0)'
)
figure.write_html('logo.html')
Example-18: Build MADX and ELEGANT style lattice
[1]:
# In this example it is demonstraited how to load MADX and ELEGANT lattice files
# Supported elements (other elemet types will be casted to drifts)
# Drift
# Quadrupole
# Sextupole
# Octupole
# Dipole
# BPM
# Marker
# Line
# Note, only basic options are translated (not translated options are ignored)
# Note, reference orbit slicing is not correct with negative bending
[2]:
from pathlib import Path
from model.external import load_lattice
from model.command.build import build
from model.command.layout import Layout
from plotly import graph_objects
[3]:
# Load and build simple MADX lattice
# Set lattice file path
file = Path('../../../config/initial.madx')
# Load lattice to dictionary
table = load_lattice(file)
# Build lattice
FODO = build('FODO', 'MADX', table)
print(FODO)
Marker(name="HEAD")
BPM(name="M", direction=forward)
Quadrupole(name="QD", length=0.5, kn=-0.199999999999999, ks=0.0, dp=0.0, exact=False, ns=1, order=0)
Drift(name="DR", length=2.0, dp=0.0, exact=False, ns=1, order=0)
Dipole(name="BM", length=1.0, angle=0.17453292519943395, e1=0.0, e2=0.0, kn=1e-15, ks=0.0, ms=0.0, mo=0.0, dp=0.0, exact=False, ns=1, order=0)
Drift(name="DR", length=2.0, dp=0.0, exact=False, ns=1, order=0)
Quadrupole(name="QF", length=1.0, kn=0.200000000000001, ks=0.0, dp=0.0, exact=False, ns=1, order=0)
Drift(name="DR", length=2.0, dp=0.0, exact=False, ns=1, order=0)
Dipole(name="BM", length=1.0, angle=0.17453292519943395, e1=0.0, e2=0.0, kn=1e-15, ks=0.0, ms=0.0, mo=0.0, dp=0.0, exact=False, ns=1, order=0)
Drift(name="DR", length=2.0, dp=0.0, exact=False, ns=1, order=0)
Quadrupole(name="QD", length=0.5, kn=-0.199999999999999, ks=0.0, dp=0.0, exact=False, ns=1, order=0)
Marker(name="TAIL")
[4]:
# Load and build simple ELEGANT lattice
# Set lattice file path
file = Path('../../../config/initial.lte')
# Load lattice to dictionary
table = load_lattice(file)
# Build lattice
FODO = build('FODO', 'ELEGANT', table)
print(FODO)
Marker(name="HEAD")
BPM(name="M", direction=forward)
Quadrupole(name="QD", length=0.5, kn=-0.199999999999999, ks=0.0, dp=0.0, exact=False, ns=1, order=0)
Drift(name="DR", length=2, dp=0.0, exact=False, ns=1, order=0)
Dipole(name="BM", length=1.0, angle=0.17453292519943395, e1=0.0, e2=0.0, kn=1e-15, ks=0.0, ms=0.0, mo=0.0, dp=0.0, exact=False, ns=1, order=0)
Drift(name="DR", length=2, dp=0.0, exact=False, ns=1, order=0)
Quadrupole(name="QF", length=1.0, kn=0.200000000000001, ks=0.0, dp=0.0, exact=False, ns=1, order=0)
Drift(name="DR", length=2, dp=0.0, exact=False, ns=1, order=0)
Dipole(name="BM", length=1.0, angle=0.17453292519943395, e1=0.0, e2=0.0, kn=1e-15, ks=0.0, ms=0.0, mo=0.0, dp=0.0, exact=False, ns=1, order=0)
Drift(name="DR", length=2, dp=0.0, exact=False, ns=1, order=0)
Quadrupole(name="QD", length=0.5, kn=-0.199999999999999, ks=0.0, dp=0.0, exact=False, ns=1, order=0)
Marker(name="TAIL")
[5]:
# Build vepp4 lattice
file = Path('../../../config/vepp4m.lte')
data = load_lattice(file)
vepp = build('VEPP4M', 'ELEGANT', data)
# Slice dipoles
vepp.ns = (('Dipole', 0.1), )
# Profile
layout = Layout(vepp)
# Generate reference orbit
x, y, z = layout.orbit(flat=False, step=None, start=(0, 0))
# Generate layout (can be saved as html with write_html method)
blocks = layout.profile_3d(scale=2.5, exclude=['Drift', 'Marker'])
# # Plot
# figure = graph_objects.Figure(
# data=[
# graph_objects.Scatter3d(
# x=x.numpy(),
# y=y.numpy(),
# z=z.numpy(),
# mode='lines',
# name='Orbit',
# line=dict(color='black',width=2.0,dash='solid'),
# opacity=0.75,
# showlegend=True
# ),
# *[graph_objects.Mesh3d(block) for block in blocks]
# ]
# )
# figure.update_layout(
# scene=dict(
# xaxis=dict(visible=False, range=[-100,100]),
# yaxis=dict(visible=False, range=[-100,100]),
# zaxis=dict(visible=False, range=[-25,25]),
# aspectratio=dict(x=1, y=1, z=1/4),
# annotations=[]
# ),
# margin=dict(l=0, r=0, t=0, b=0),
# legend=dict(orientation='v', x=0., y=1., xanchor='left', yanchor='top'),
# hoverlabel=dict(font_size=12, font_family="Rockwell", font_color='white'),
# legend_groupclick='toggleitem'
# )
# figure.show()
[6]:
# Build skif lattice
file = Path('../../../config/skif.lte')
data = load_lattice(file)
skif = build('SKIF', 'ELEGANT', data)
# Slice dipoles
skif.ns = (('Dipole', 0.1), )
# Profile
layout = Layout(skif)
# Generate reference orbit
x, y, z = layout.orbit(flat=False, step=None, start=(0, 0))
# Generate layout (can be saved as html with write_html method)
blocks = layout.profile_3d(scale=2.5, exclude=['Drift', 'Marker'])
# # Plot
# figure = graph_objects.Figure(
# data=[
# graph_objects.Scatter3d(
# x=x.numpy(),
# y=y.numpy(),
# z=z.numpy(),
# mode='lines',
# name='Orbit',
# line=dict(color='black',width=2.0,dash='solid'),
# opacity=0.75,
# showlegend=True
# ),
# *[graph_objects.Mesh3d(block) for block in blocks]
# ]
# )
# figure.update_layout(
# scene=dict(
# xaxis=dict(visible=False, range=[-200,200]),
# yaxis=dict(visible=False, range=[-200,200]),
# zaxis=dict(visible=False, range=[-50,50]),
# aspectratio=dict(x=1, y=1, z=1/4),
# annotations=[]
# ),
# margin=dict(l=0, r=0, t=0, b=0),
# legend=dict(orientation='v', x=0., y=1., xanchor='left', yanchor='top'),
# hoverlabel=dict(font_size=12, font_family="Rockwell", font_color='white'),
# legend_groupclick='toggleitem'
# )
# figure.show()
Example-19: Wrapper
[1]:
# In this example construction of parametric call wrappers is illustrated
# For elements, all deviation parameters are passed as dictionary
# Wrapped elements are invoked using positional agruments
[2]:
# Import
from pprint import pprint
import torch
from twiss import twiss
from ndmap.pfp import parametric_fixed_point
from ndmap.evaluate import evaluate
from ndmap.signature import chop
from model.library.drift import Drift
from model.library.multipole import Multipole
from model.library.dipole import Dipole
from model.library.line import Line
from model.command.wrapper import wrapper
[3]:
# Define simple FODO based lattice using nested lines
QF = Multipole('QF', 0.5, +0.20)
QD = Multipole('QD', 0.5, -0.19)
DR = Drift('DR', 0.75)
BM = Dipole('BM', 3.50, torch.pi/4.0)
FODO = [QF, DR, BM, DR, QD, QD, DR, BM, DR, QF]
FODO_A = Line('FODO_A', FODO, propagate=True, dp=0.0, exact=False, output=False, matrix=False)
FODO_B = Line('FODO_B', FODO, propagate=True, dp=0.0, exact=False, output=False, matrix=False)
FODO_C = Line('FODO_C', FODO, propagate=True, dp=0.0, exact=False, output=False, matrix=False)
FODO_D = Line('FODO_D', FODO, propagate=True, dp=0.0, exact=False, output=False, matrix=False)
LINE_AB = Line('LINE_AB', [FODO_A, FODO_B], propagate=True, dp=0.0, exact=False, output=False, matrix=False)
LINE_CD = Line('LINE_CD', [FODO_C, FODO_D], propagate=True, dp=0.0, exact=False, output=False, matrix=False)
RING = Line('RING', [LINE_AB, LINE_CD], propagate=True, dp=0.0, exact=False, output=False, matrix=False)
[4]:
# Deviation variables are passed to elements/lines as dictionaries
# In order to compute derivatives with respect to a deviation variable
# A tensor should be binded to a corresponding leaf deviation dictionary value
pprint(RING.table(alignment=False), sort_dicts=False)
{'LINE_AB': {'FODO_A': {'QF': {'kn': tensor(0., dtype=torch.float64),
'ks': tensor(0., dtype=torch.float64),
'ms': tensor(0., dtype=torch.float64),
'mo': tensor(0., dtype=torch.float64),
'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64)},
'DR': {'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64)},
'BM': {'dw': tensor(0., dtype=torch.float64),
'e1': tensor(0., dtype=torch.float64),
'e2': tensor(0., dtype=torch.float64),
'kn': tensor(0., dtype=torch.float64),
'ks': tensor(0., dtype=torch.float64),
'ms': tensor(0., dtype=torch.float64),
'mo': tensor(0., dtype=torch.float64),
'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64)},
'QD': {'kn': tensor(0., dtype=torch.float64),
'ks': tensor(0., dtype=torch.float64),
'ms': tensor(0., dtype=torch.float64),
'mo': tensor(0., dtype=torch.float64),
'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64)},
'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64),
'dw': tensor(0., dtype=torch.float64)},
'FODO_B': {'QF': {'kn': tensor(0., dtype=torch.float64),
'ks': tensor(0., dtype=torch.float64),
'ms': tensor(0., dtype=torch.float64),
'mo': tensor(0., dtype=torch.float64),
'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64)},
'DR': {'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64)},
'BM': {'dw': tensor(0., dtype=torch.float64),
'e1': tensor(0., dtype=torch.float64),
'e2': tensor(0., dtype=torch.float64),
'kn': tensor(0., dtype=torch.float64),
'ks': tensor(0., dtype=torch.float64),
'ms': tensor(0., dtype=torch.float64),
'mo': tensor(0., dtype=torch.float64),
'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64)},
'QD': {'kn': tensor(0., dtype=torch.float64),
'ks': tensor(0., dtype=torch.float64),
'ms': tensor(0., dtype=torch.float64),
'mo': tensor(0., dtype=torch.float64),
'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64)},
'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64),
'dw': tensor(0., dtype=torch.float64)},
'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64),
'dw': tensor(0., dtype=torch.float64)},
'LINE_CD': {'FODO_C': {'QF': {'kn': tensor(0., dtype=torch.float64),
'ks': tensor(0., dtype=torch.float64),
'ms': tensor(0., dtype=torch.float64),
'mo': tensor(0., dtype=torch.float64),
'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64)},
'DR': {'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64)},
'BM': {'dw': tensor(0., dtype=torch.float64),
'e1': tensor(0., dtype=torch.float64),
'e2': tensor(0., dtype=torch.float64),
'kn': tensor(0., dtype=torch.float64),
'ks': tensor(0., dtype=torch.float64),
'ms': tensor(0., dtype=torch.float64),
'mo': tensor(0., dtype=torch.float64),
'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64)},
'QD': {'kn': tensor(0., dtype=torch.float64),
'ks': tensor(0., dtype=torch.float64),
'ms': tensor(0., dtype=torch.float64),
'mo': tensor(0., dtype=torch.float64),
'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64)},
'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64),
'dw': tensor(0., dtype=torch.float64)},
'FODO_D': {'QF': {'kn': tensor(0., dtype=torch.float64),
'ks': tensor(0., dtype=torch.float64),
'ms': tensor(0., dtype=torch.float64),
'mo': tensor(0., dtype=torch.float64),
'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64)},
'DR': {'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64)},
'BM': {'dw': tensor(0., dtype=torch.float64),
'e1': tensor(0., dtype=torch.float64),
'e2': tensor(0., dtype=torch.float64),
'kn': tensor(0., dtype=torch.float64),
'ks': tensor(0., dtype=torch.float64),
'ms': tensor(0., dtype=torch.float64),
'mo': tensor(0., dtype=torch.float64),
'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64)},
'QD': {'kn': tensor(0., dtype=torch.float64),
'ks': tensor(0., dtype=torch.float64),
'ms': tensor(0., dtype=torch.float64),
'mo': tensor(0., dtype=torch.float64),
'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64)},
'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64),
'dw': tensor(0., dtype=torch.float64)},
'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64),
'dw': tensor(0., dtype=torch.float64)},
'dp': tensor(0., dtype=torch.float64),
'dl': tensor(0., dtype=torch.float64),
'dw': tensor(0., dtype=torch.float64)}
[5]:
# Compute parametric closed orbit (first order with respect to momentum deviation)
# Without wrapping, all momenta deviation occurances should be binded to a singel tensor
# Hence, deviation table should be traversed recursively down to all leafs
def scan(data, name, target):
for key, value in data.items():
if isinstance(value, dict):
scan(value, name, target)
elif key == name:
data[key] = target
# Set ring function
def ring(state, dp):
dp, *_ = dp
data = RING.table()
scan(data, 'dp', dp)
return RING(state, data=data)
# Set deviations
fp = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
dp = torch.tensor([0.0], dtype=torch.float64)
# Compute pfp
pfp, *_ = parametric_fixed_point((1, ), fp, [dp], ring)
chop(pfp)
pfp
[5]:
[tensor([0., 0., 0., 0.], dtype=torch.float64),
tensor([[4.4462],
[0.0000],
[0.0000],
[0.0000]], dtype=torch.float64)]
[6]:
# Using wrapper we can define the about ring function as follows
ring = wrapper(RING, (None, None, 'dp'))
# Set deviations
fp = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
dp = torch.tensor([0.0], dtype=torch.float64)
# Compute pfp
pfp, *_ = parametric_fixed_point((1, ), fp, [dp], ring)
chop(pfp)
pfp
[6]:
[tensor([0., 0., 0., 0.], dtype=torch.float64),
tensor([[4.4462],
[0.0000],
[0.0000],
[0.0000]], dtype=torch.float64)]
[7]:
# Compute chromaticity (without wrapping)
def scan(data, name, target):
for key, value in data.items():
if isinstance(value, dict):
scan(value, name, target)
elif key == name:
data[key] = target
# Set ring function
def ring(state, dp):
dp, *_ = dp
data = RING.table()
scan(data, 'dp', dp)
return RING(state , data=data)
# Set ring function around pfp
def pfp_ring(state, dp):
return ring(state + evaluate(pfp, [dp]), dp) - evaluate(pfp, [dp])
# Set tune function
def tune(dp):
matrix = torch.func.jacrev(pfp_ring)(state, dp)
tunes, *_ = twiss(matrix)
return tunes
state = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
dp = torch.tensor([0.0], dtype=torch.float64)
print(tune(dp))
print(torch.func.jacrev(tune)(dp).squeeze())
tensor([0.6951, 0.7019], dtype=torch.float64)
tensor([-2.0649, -0.8260], dtype=torch.float64)
[8]:
# Compute chromaticity (with wrapping)
# Set ring function
ring = wrapper(RING, (None, None, 'dp'))
# Set ring function around pfp
def pfp_ring(state, dp):
return ring(state + evaluate(pfp, [dp]), dp) - evaluate(pfp, [dp])
# Set tune function
def tune(dp):
matrix = torch.func.jacrev(pfp_ring)(state, dp)
tunes, *_ = twiss(matrix)
return tunes
state = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
dp = torch.tensor([0.0], dtype=torch.float64)
print(tune(dp))
print(torch.func.jacrev(tune)(dp).squeeze())
tensor([0.6951, 0.7019], dtype=torch.float64)
tensor([-2.0649, -0.8260], dtype=torch.float64)
[9]:
# Compute chromaticity derivative with respect to sextupole ampitudes (without wrapping)
def scan(data, name, target):
for key, value in data.items():
if isinstance(value, dict):
scan(value, name, target)
elif key == name:
data[key] = target
def ring(state, dp, dms):
dp, *_ = dp
dmsf, dmsd, *_ = dms
data = RING.table()
scan(data, 'dp', dp)
data['LINE_AB']['FODO_A']['QF']['ms'] = dmsf
data['LINE_AB']['FODO_B']['QF']['ms'] = dmsf
data['LINE_CD']['FODO_C']['QF']['ms'] = dmsf
data['LINE_CD']['FODO_D']['QF']['ms'] = dmsf
data['LINE_AB']['FODO_A']['QD']['ms'] = dmsd
data['LINE_AB']['FODO_B']['QD']['ms'] = dmsd
data['LINE_CD']['FODO_C']['QD']['ms'] = dmsd
data['LINE_CD']['FODO_D']['QD']['ms'] = dmsd
return RING(state, data=data)
def pfp_ring(state, dp, dms):
return ring(state + evaluate(pfp, [dp]), dp, dms) - evaluate(pfp, [dp])
def tune(dp, dms):
matrix = torch.func.jacrev(pfp_ring)(state, dp, dms)
tunes, *_ = twiss(matrix)
return tunes
def chromaticity(dms):
return torch.func.jacrev(tune)(dp, dms)
state = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
dms = torch.tensor([0.0, 0.0], dtype=torch.float64)
dp = torch.tensor([0.0], dtype=torch.float64)
print(tune(dp, dms))
print(chromaticity(dms).squeeze())
print(torch.func.jacrev(chromaticity)(dms).squeeze())
tensor([0.6951, 0.7019], dtype=torch.float64)
tensor([-2.0649, -0.8260], dtype=torch.float64)
tensor([[ 25.8500, 1.0470],
[ -9.0271, -16.4821]], dtype=torch.float64)
[10]:
# Compute chromaticity derivative with respect to sextupole ampitudes (with wrapping)
ring = wrapper(RING, (None, None, 'dp'), (None, ['QF', 'QD'], 'ms'))
def pfp_ring(state, dp, dms):
return ring(state + evaluate(pfp, [dp]), dp, dms) - evaluate(pfp, [dp])
def tune(dp, dms):
matrix = torch.func.jacrev(pfp_ring)(state, dp, dms)
tunes, *_ = twiss(matrix)
return tunes
def chromaticity(dms):
return torch.func.jacrev(tune)(dp, dms)
state = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
dms = torch.tensor([0.0, 0.0], dtype=torch.float64)
dp = torch.tensor([0.0], dtype=torch.float64)
print(tune(dp, dms))
print(chromaticity(dms).squeeze())
print(torch.func.jacrev(chromaticity)(dms).squeeze())
tensor([0.6951, 0.7019], dtype=torch.float64)
tensor([-2.0649, -0.8260], dtype=torch.float64)
tensor([[ 25.8500, 1.0470],
[ -9.0271, -16.4821]], dtype=torch.float64)
[11]:
# The above examples demonstrate how to bind tensors to all leafs or to given elements (in all lines)
# (None, None, parameter:str) -- bind tensor to all leaf parameters
# (None, names:list[str], parameter:str) -- bind tensor to all leaf parameters in specified elements
# (path:list[str], names:list[str], parameter:str) -- bind tensor to all leaf parameters in specified elements in given path (path to specific line)
[12]:
# Bind QF and QD in all sublines of a given line (1/2 of sextupoles)
ring = wrapper(RING, (None, None, 'dp'), (['LINE_AB'], ['QF', 'QD'], 'ms'))
def pfp_ring(state, dp, dms):
return ring(state + evaluate(pfp, [dp]), dp, dms) - evaluate(pfp, [dp])
def tune(dp, dms):
matrix = torch.func.jacrev(pfp_ring)(state, dp, dms)
tunes, *_ = twiss(matrix)
return tunes
def chromaticity(dms):
return torch.func.jacrev(tune)(dp, dms)
state = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
dms = torch.tensor([0.0, 0.0], dtype=torch.float64)
dp = torch.tensor([0.0], dtype=torch.float64)
print(tune(dp, dms))
print(chromaticity(dms).squeeze())
print(2*torch.func.jacrev(chromaticity)(dms).squeeze())
tensor([0.6951, 0.7019], dtype=torch.float64)
tensor([-2.0649, -0.8260], dtype=torch.float64)
tensor([[ 25.8500, 1.0470],
[ -9.0271, -16.4821]], dtype=torch.float64)
[13]:
# Bind QF and QD in a given leaf line (1/4 of sextupoles)
ring = wrapper(RING, (None, None, 'dp'), (['LINE_AB', 'FODO_A'], ['QF', 'QD'], 'ms'))
def pfp_ring(state, dp, dms):
return ring(state + evaluate(pfp, [dp]), dp, dms) - evaluate(pfp, [dp])
def tune(dp, dms):
matrix = torch.func.jacrev(pfp_ring)(state, dp, dms)
tunes, *_ = twiss(matrix)
return tunes
def chromaticity(dms):
return torch.func.jacrev(tune)(dp, dms)
state = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
dms = torch.tensor([0.0, 0.0], dtype=torch.float64)
dp = torch.tensor([0.0], dtype=torch.float64)
print(tune(dp, dms))
print(chromaticity(dms).squeeze())
print(4*torch.func.jacrev(chromaticity)(dms).squeeze())
tensor([0.6951, 0.7019], dtype=torch.float64)
tensor([-2.0649, -0.8260], dtype=torch.float64)
tensor([[ 25.8500, 1.0470],
[ -9.0271, -16.4821]], dtype=torch.float64)
[14]:
# Several sextupole groups
ring = wrapper(RING, (None, None, 'dp'), (['LINE_AB'], ['QF', 'QD'], 'ms'), (['LINE_CD'], ['QF', 'QD'], 'ms'))
def pfp_ring(state, dp, dms_ab, dms_cd):
return ring(state + evaluate(pfp, [dp]), dp, dms_ab, dms_cd) - evaluate(pfp, [dp])
def tune(dp, dms_ab, dms_cd):
matrix = torch.func.jacrev(pfp_ring)(state, dp, dms_ab, dms_cd)
tunes, *_ = twiss(matrix)
return tunes
def chromaticity(dms_ab, dms_cd):
return torch.func.jacrev(tune)(dp, dms_ab, dms_cd)
state = torch.tensor([0.0, 0.0, 0.0, 0.0], dtype=torch.float64)
dms_ab = torch.tensor([0.0, 0.0], dtype=torch.float64)
dms_cd = torch.tensor([0.0, 0.0], dtype=torch.float64)
dp = torch.tensor([0.0], dtype=torch.float64)
print(tune(dp, dms_ab, dms_cd))
print(chromaticity(dms_ab, dms_cd).squeeze())
print(torch.func.jacrev(chromaticity, 0)(dms_ab, dms_cd).squeeze())
print(torch.func.jacrev(chromaticity, 1)(dms_ab, dms_cd).squeeze())
def fn(dms):
dms_ab, dms_cd = dms
return chromaticity(dms_ab, dms_cd)
print(torch.func.jacrev(fn)(torch.stack([dms_ab, dms_cd])).squeeze())
tensor([0.6951, 0.7019], dtype=torch.float64)
tensor([-2.0649, -0.8260], dtype=torch.float64)
tensor([[12.9250, 0.5235],
[-4.5135, -8.2411]], dtype=torch.float64)
tensor([[12.9250, 0.5235],
[-4.5135, -8.2411]], dtype=torch.float64)
tensor([[[12.9250, 0.5235],
[12.9250, 0.5235]],
[[-4.5135, -8.2411],
[-4.5135, -8.2411]]], dtype=torch.float64)
[ ]: